
{kind=link}

Mars Reconnaissance Orbiter
Renseignements g??n??raux
SOS Enfants, qui se d??roule pr??s de 200 sos ??coles dans le monde en d??veloppement, a organis?? cette s??lection. Cliquez ici pour plus d'informations sur les enfants SOS.
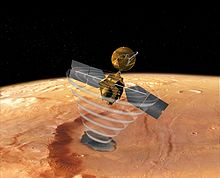
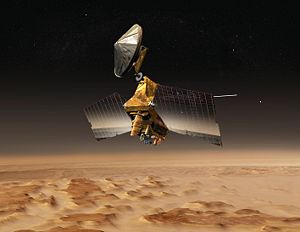 Image conceptuelle repr??sentant la sonde Mars Reconnaissance Orbiter dans un faible plan??te orbite elliptique autour de Mars | |
| Op??rateur | NASA / JPL |
|---|---|
| Les principaux entrepreneurs | Lockheed Martin Space Systems Universit?? de l'Arizona Laboratoire de physique appliqu??e Agence spatiale italienne Malin Space Science Systems, |
| Type de mission | Orbiter |
| Satellite | Mars |
| Orbital la date d'insertion | 2006-03-10 21:24:00 UTC |
| Orbites | 93 ?? d'inclinaison ?? 15h00 signifie solaire finale orbite h??liosynchrone temps locale la science primaire |
| Date de lancement | 2005-08-12 11:43:00 UTC |
| fus??e porteuse | Atlas V-401 |
| Site de lancement | Complexe de lancement spatial 41 Base de lancement de Cap Canaveral |
| Dur??e de la mission | Mission principale:> 2 ans ??coul??: 7 ans, 7 mois et 8 jours (2703 sols) |
| COSPAR ID | 2005-029A |
| Page d'accueil | http://marsprogram.jpl.nasa.gov/mro/ |
| Masse | 2180 kg (?? 4,800) aliment??s 1031 kg (?? 2,270) secs |
| Puissance | 2,000.0 W |
| R??f??rences: | |
Mars Reconnaissance Orbiter (MRO) est un multifonction vaisseau spatial con??u pour effectuer une reconnaissance et d'exploration de Mars depuis l'orbite. Les ??tats-Unis $ 720 000 000 vaisseau a ??t?? construit par Lockheed Martin sous la supervision de la Jet Propulsion Laboratory. La mission est g??r?? par le JPL, au California Institute of Technology, La Canada Flintridge, Californie, pour la NASA Direction des missions scientifiques, Washington, DC Il a ??t?? lanc?? le 12 Ao??t 2005, et a atteint l'orbite martienne le 10 Mars, 2006. En Novembre 2006, apr??s cinq mois de a??rofreinage, il est entr?? dans son orbite de science finale et a commenc?? sa phase scientifique primaire. Comme MRO est entr?? en orbite, il a rejoint cinq autres engins spatiaux actif qui ??taient soit en orbite ou sur la surface de la plan??te: Mars Global Surveyor, Mars Express, Mars Odyssey, et deux Mars Exploration Rovers ; au moment o?? un record pour le vaisseau spatial le plus op??rationnelle dans le voisinage imm??diat de Mars.
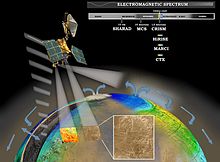
MRO contient une foule d'instruments scientifiques tels que des cam??ras, spectrom??tres et radar , qui sont utilis??s pour analyser la reliefs, stratigraphie, min??raux, et la glace de Mars. Il ouvre la voie ?? de futures missions en surveillant de Mars le jour la m??t??o et les conditions de surface, qui ??tudient les sites potentiels d'atterrissage, et l'h??bergement d'un nouveau syst??me de t??l??communications. Le syst??me de t??l??communications de MRO transf??rer plus de donn??es vers la Terre de toutes les missions interplan??taires pr??c??dentes combin??es, et MRO servira de satellite de relais tr??s capable pour de futures missions.
Pr??-lancement
MRO a ??t?? l'une des deux missions envisag??e pour Mars 2003 lancer fen??tre; Toutefois, pendant le processus de proposition de l'orbiteur a perdu contre ce qui est devenu connu comme les Mars Exploration Rovers . La mission de l'orbiteur a ??t?? report??e pour le lancement en 2005, et la NASA a annonc?? son nom d??finitif, Mars Reconnaissance Orbiter, le 26 Octobre 2000.
MRO est calqu??e NASA tr??s r??ussie Mars Global Surveyor de proc??der ?? la surveillance de Mars depuis l'orbite. Les premi??res sp??cifications du satellite inclus un grand appareil photo pour prendre des photos de Mars en haute r??solution. ?? cet ??gard, Jim Garvin, le programme d'exploration de Mars scientifique pour la NASA, a proclam?? que MRO serait un "microscope en orbite". Le satellite ??tait aussi inclure un spectrographe visible-proche infrarouge.
Le 3 Octobre 2001, la NASA a choisi Lockheed Martin comme entrepreneur principal pour la fabrication de l'engin spatial. ?? la fin de 2001 tous les instruments de la mission ont ??t?? s??lectionn??s. Il n'y avait pas d'importants revers au cours de la construction de MRO, et le vaisseau spatial a ??t?? d??plac?? ?? Centre spatial John F. Kennedy, le 1er mai 2005 pour le pr??parer pour le lancement.
Objectifs de la mission
Op??rations scientifiques MRO ont ??t?? initialement pr??vues pour durer deux ann??es terrestres, de Novembre 2006 ?? Novembre 2008. L'un des principaux objectifs de la mission est de cartographier le paysage martien avec ses cam??ras ?? haute r??solution afin de choisir des sites d'atterrissage pour les futures missions de surface. Le MRO a jou?? un r??le important dans le choix du site d'atterrissage de la sonde Phoenix , qui a explor?? l'Arctique martien en Green Valley. Le site initial choisi par les scientifiques a ??t?? imag?? avec le Cam??ra HiRISE et d??clar?? ??tre jonch??es de rochers. Apr??s analyse de la HiRISE et THEMIS un nouveau site de Mars Odyssey a ??t?? choisi. Mars Science Laboratory, un rover tr??s maniable, a ??galement son site d'atterrissage inspect??. Le MRO a fourni des donn??es de navigation critiques lors de leurs d??barquements et agit comme un relais de t??l??communications.
MRO utilise son mat??riel scientifique ?? bord d'??tudier la Climat martien, la m??t??o, l'atmosph??re, et la g??ologie, et de rechercher des signes de eau liquide dans les calottes polaires et souterrain. En outre, MRO est ?? la recherche des vestiges de l'auparavant perdu Mars Polar Lander et Beagle 2 vaisseau spatial. Apr??s ses principales op??rations scientifiques sont termin??es, mission prolong??e de la sonde est d'??tre le syst??me de communication et de navigation pour les atterrisseurs et des sondes de Rover.
Lancement et l'insertion orbitale

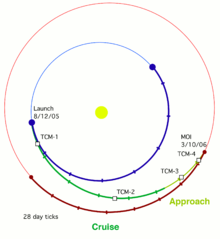
Le 12 Ao??t 2005, MRO a ??t?? lanc?? ?? bord d'un Atlas V-401 fus??e Complexe de lancement spatial au 41 Base de lancement de Cap Canaveral. Le ??tage sup??rieur de la fus??e Centaur a achev?? ses br??lures sur une p??riode de cinquante-six minutes et plac?? dans un MRO interplan??taire orbite de transfert vers Mars.
MRO a survol?? l'espace interplan??taire pour sept mois et demi avant d'atteindre Mars. En route la plupart des instruments scientifiques et des exp??riences ont ??t?? test??s et calibr??s. Pour assurer le bon insertion orbital apr??s avoir atteint Mars, quatre man??uvres de correction de trajectoire ont ??t?? planifi??s et cinqui??me manoeuvre d'urgence a ??t?? discut??e. Cependant, seulement trois man??uvres de correction de trajectoire ??taient n??cessaires, qui a sauv?? ?? 60 (27 kg) de carburant qui serait utilisable lors de la mission ??largie de MRO.
MRO a commenc?? insertion orbitale en approchant Mars le 10 Mars 2006, et passant au-dessus de son h??misph??re sud ?? une altitude de 370 ?? 400 km (230 ?? 250 km). Les six moteurs principaux de MRO br??l?? pendant 27 minutes pour ralentir la sonde de 2900 ?? 1900 m??tres par seconde (9500 ?? 6200 pieds / s). Le r??servoir de mise sous pression de l'h??lium a ??t?? plus froid que pr??vu, ce qui a r??duit la pression dans le r??servoir de carburant d'environ 21 kilopascals (3,0 psi). La pression r??duite caus?? le moteur de pouss??e ??tre diminu?? de 2%, mais MRO automatiquement compens??e par l'extension de la dur??e de combustion de 33 secondes.
Ach??vement de l'insertion orbitale plac?? l'orbiteur dans un tr??s orbite polaire elliptique avec une p??riode d'environ 35,5 heures. Peu de temps apr??s l'insertion, le p??riastre - le point de l'orbite le plus proche de Mars - ??tait 3806 km (2365 km) du centre de la plan??te (426 km (265 mi) de sa surface). Le apoapsis - le point le plus ??loign?? de l'orbite de Mars - ??tait 47972 km (29 808 km) du centre de la plan??te (44500 km (27 700 mi) de sa surface).

Le 30 Mars 2006, MRO a commenc?? le processus de a??rofreinage, une proc??dure en trois ??tapes qui coupe en deux le carburant n??cessaire pour atteindre une orbite inf??rieure, plus circulaire avec une p??riode plus courte. Premi??rement, au cours de ses cinq premi??res orbites de la plan??te (une semaine de la Terre), MRO utilis?? ses propulseurs d'abandonner le p??rig??e de son orbite en a??rofreinage altitude. Cette altitude d??pend de l'??paisseur de la atmosph??re, car martiennes densit?? atmosph??rique change avec ses saisons. Deuxi??mement, tout en utilisant ses propulseurs pour apporter des corrections mineures ?? son altitude de p??rig??e, MRO maintenu a??rofreinage altitude pour 445 orbites plan??taires (environ 5 mois de la Terre) pour r??duire le apog??e de l'orbite ?? 450 km (280 mi). Cela a ??t?? fait de telle mani??re afin de ne pas chauffer la sonde trop, mais aussi assez tremper dans l'atmosph??re pour ralentir l'engin spatial vers le bas. Apr??s le processus ??tait compl??te, MRO utilis?? ses propulseurs pour d??placer son p??rig??e sur le bord de l'atmosph??re martienne le 30 Ao??t 2006.
En Septembre 2006 MRO tir?? ses propulseurs deux fois plus pour peaufiner sa derni??re orbite, presque circulaire ?? environ 250 ?? 316 kilom??tres (160 ?? 196 km) au-dessus de la surface martienne. Le Sharad antennes radar ont ??t?? d??ploy??s sur 16. Septembre Tous les instruments scientifiques ont ??t?? test??s et la plupart ont ??t?? ??teints avant la conjonction solaire qui a eu lieu du 7 Octobre to 6 Novembre 2006. Apr??s la conjonction mis fin ?? la "phase scientifique primaire?? a commenc??.
Le 17 Novembre 2006 la NASA a annonc?? le test r??ussi de la MRO comme un relais de communication orbital. Utilisation du rover de la NASA " Esprit "comme point d'origine pour la transmission, le MRO a agi comme un relais pour la transmission de donn??es vers la Terre.
Manifestations et d??couvertes

Le 29 Septembre 2006 ( Sol 402), MRO a pris sa premi??re image haute r??solution de son orbite de la science. Cette image est dit pour r??soudre ??l??ments aussi petits que 90 cm (3 pieds) de diam??tre. Le 6 Octobre, la NASA a publi?? des images d??taill??es de la MRO des Crat??re Victoria avec le Rover Opportunity sur la jante au-dessus. En Novembre, les probl??mes ont commenc?? ?? appara??tre dans le fonctionnement des deux instruments de l'engin spatial MRO. Un m??canisme pas ?? pas dans le Mars Climate Sounder (MCS) a saut?? ?? plusieurs reprises r??sultant dans un champ de vision qui est l??g??rement hors de position. En D??cembre op??rations normales de l'instrument a ??t?? suspendu, mais une strat??gie d'att??nuation permet ?? l'instrument de continuer ?? faire la plupart de ses observations destin??s. En outre, une augmentation du bruit et r??sultant mauvaise pixels a ??t?? observ??e dans plusieurs CCD de la Haute Resolution Imaging Experiment Science (HiRISE). L'utilisation de cet appareil photo avec un temps plus long warm-up a att??nu?? la question. Cependant, la cause est encore inconnue et peut revenir.
HiRISE continue de renvoyer des images qui ont permis des d??couvertes concernant la g??ologie de Mars. Au premier rang de ceux-ci est l'annonce d'observations de terrain bagu??s indiquant la pr??sence et l'action de liquide de dioxyde de carbone (CO 2) ou de l'eau sur la surface de Mars dans son pass?? g??ologique r??cent. HiRISE a pu photographier l' atterrisseur Phoenix lors de sa descente ?? parachut?? Vastitas Borealis sur le 25 mai 2008 (sol 990).
L'orbiteur a continu?? d'??prouver des probl??mes r??currents en 2009, dont quatre r??initialisations spontan??es, aboutissant ?? une de quatre mois arr??t de l'engin spatial d'Ao??t ?? D??cembre. Tandis que les ing??nieurs ne ont pas d??termin?? la cause de la r??initialisation r??currents, ils ont cr???? un nouveau logiciel pour aider ?? r??soudre le probl??me devrait-il se reproduire.
Le 6 Ao??t 2012 (La Sol 2483, l'orbiteur pass?? au-dessus Crat??re Gale, le site d'atterrissage de la La mission Mars Science Laboratory, au cours de sa La phase EDL. Il a captur?? une image via la cam??ra HiRISE de la Curiosit?? rover d??croissant avec son backshell et parachute supersonique.
Instruments
Trois cam??ras, deux spectrom??tres et un radar sont inclus sur l'orbiteur avec deux "instruments de science-installation??, qui utilisent les donn??es de sous-syst??mes d'ing??nierie pour recueillir des donn??es scientifiques. Trois exp??riences technologiques permettra de tester et de d??montrer de nouveaux ??quipements pour les futures missions. Il est pr??vu MRO obtiendra environ 5000 images par an.
HiRISE (cam??ra)

La cam??ra haute r??solution Exp??rience Imaging Science est un 0,5 m t??lescope r??flecteur, la plus importante jamais r??alis??e sur un mission de l'espace profond, et a une r??solution de 1 microradian (mrad), soit 0,3 m ?? une altitude de 300 km. En comparaison, images satellite de la Terre sont g??n??ralement disponibles avec une r??solution de 0,5 m, et des images satellite sur Google Maps sont disponibles pour 1 m. HiRISE recueille des images en trois bandes de couleur, de 400 ?? 600 nm (bleu-vert), BG ou de 550 ?? 850 nm (rouge) et de 800 ?? 1000 nm ( proche infrarouge ou NIR).
Images de couleurs rouges sont 20264 pixels ?? travers (6 km de large), et BG et NIR sont 4048 pixels ?? travers (1,2 km de large). Ordinateur de bord de HiRISE lit ces lignes dans le temps avec l'orbiteur de la vitesse au sol, et les images sont potentiellement illimit?? dans la longueur. Pratiquement cependant, leur longueur est limit??e par l'ordinateur de 28 Gigabit (Gb) de capacit?? de la m??moire, et la taille maximale nominale est de 20.000 ?? 40 000 pixels (800 m??gapixels) et 4000 ?? 160 pixels (40 000 m??gapixels) pour BG et NIR images. Chaque image 16,4 Gb est comprim?? ?? 5 Gb avant la transmission et rel??chez pour le grand public sur la Site HiRISE dans Format JPEG 2000. Pour faciliter la cartographie des sites potentiels d'atterrissage, HiRISE peut produire des paires st??r??o d'images ?? partir de laquelle on peut calculer la topographie avec une pr??cision de 0,25 m. HiRISE a ??t?? construit par Ball Aerospace & Technologies Corp.
CTX (cam??ra)
La cam??ra de contexte (CTX) fournit images en niveaux de gris (500 ?? 800 nm) avec un r??solution jusqu'?? environ 6 m de pixel. CTX est con??u pour fournir un contexte maps pour les observations cibl??es de HiRISE et CRISM, et est ??galement utilis?? pour la mosa??que de vastes zones de la plan??te Mars, suivre un certain nombre d'emplacements pour les changements au fil du temps, et d'acqu??rir st??r??o (3D) la couverture des r??gions et le potentiel cl??s futurs sites de d??barquement. Les optiques de CTX se composent d'un 350 mm distance focale Maksutov Cassegrain avec un large ??ventail 5064 pixel de ligne CCD. L'instrument prend des photos 30 km (19 mi) de large et a assez de m??moire interne pour stocker une image longue de 160 km avant de le charger dans le ordinateur principal . L'appareil a ??t?? construit et est exploit?? par Malin Space Science Systems. CTX cartographi?? 50% de Mars par F??vrier 2010. En 2012, il a trouv?? les impacts de six de 55 livres (25 kg) masses-entr??e de ballast de L'atterrissage de Mars Science Laboratory de Curiosit?? rover.
MARCI (cam??ra)
The Mars Couleur Imager (MARCI) est un grand-angle, relativement basse r??solution la cam??ra qui consid??re la surface de Mars dans cinq visible et deux ultraviolets bandes. Chaque jour, MARCI recueille environ 84 images et produit une carte mondiale avec des r??solutions de pixels ayant de 1 ?? 10 km. Cette carte fournit une bulletin m??t??o quotidien pour Mars, permet de caract??riser ses variations saisonni??res et annuelles, et des cartes de la pr??sence de vapeur d'eau et l'ozone dans l'atmosph??re. L'appareil a ??t?? construit et est exploit?? par Malin Space Science Systems. Il dispose d'un objectif fisheye 180 degr??s avec les sept filtres couleur li??s directement un capteur CCD unique.
CRISM (spectrom??tre)

Le Spectrom??tre Reconnaissance Imaging Compact pour Mars (CRISM) est un instrument visible et proche infrarouge ( VNIR) spectrom??tre qui est utilis??e pour produire des cartes d??taill??es de la surface min??ralogie de Mars. Il fonctionne 370-3920 nm, mesure le spectre de 544 canaux (chacun 6,55 nm de large), et a un r??solution de 18 m (59 pi) ?? une altitude de 300 km (190 mi). CRISM est utilis?? pour identifier les min??raux et les produits chimiques indicatifs de l'existence pass??e ou pr??sente de l'eau sur la surface de Mars. Ces mat??riaux comprennent le fer, oxydes, phyllosilicates et de carbonates , qui ont des motifs caract??ristiques de leur ??nergie visible infrarouge.
MCS (spectrom??tre)
Le Mars Climate Sounder (MCS) est un spectrom??tre ?? un canal visible / proche infrarouge (0,3 ?? 3,0 um) et huit infrarouge lointain (12-50 um) canaux. Ces canaux ont ??t?? s??lectionn??s pour mesurer la temp??rature, la pression, la vapeur d'eau et les niveaux de poussi??re. MCS observe l'atmosph??re ?? l'horizon de Mars (vu de MRO) par le d??couper en tranches verticales et prendre des mesures au sein de chaque tranche dans 5 km (3 km) incr??mente. Ces mesures sont assembl??s dans des cartes m??t??orologiques quotidiennes mondiale pour montrer les variables de base de la m??t??o martienne: la temp??rature, la pression, l'humidit??, et la densit?? de poussi??re.
SHARAD (radar)
Shallow Subsurface Radar (SHARAD) l'exp??rience de MRO est con??u pour sonder la structure interne de la polaire martienne calottes glaciaires. Il recueille ??galement des informations plan??taire sur les couches souterraines de la glace , la roche et l'eau liquide qui pourrait ??ventuellement ??tre accessible ?? partir de la surface. SHARAD utilise Ondes radio HF entre 15 et 25 MHz, une plage qui permet de r??soudre des couches aussi minces que 7 m (23 pieds) ?? une profondeur maximale de 1 km (0,6 mi). Il a une r??solution horizontale de 0,3 ?? 3 km (0,2 ?? 1,9 mi). SHARAD est con??u pour fonctionner en conjonction avec le Mars Express MARSIS, qui a une r??solution plus faible, mais p??n??tre ?? une profondeur beaucoup plus grande. Les deux SHARAD et MARSIS ont ??t?? faites par le Agence spatiale italienne.
instruments d'ing??nierie
En plus de son ??quipement d'imagerie, MRO comporte une vari??t?? d'instruments d'ing??nierie. Le forfait enqu??te sur le terrain Gravity mesure les variations dans le champ gravitationnel martien par des variations dans la vitesse de l'engin spatial. les changements de vitesse sont d??tect??es par mesure d??calages Doppler dans les signaux radio de MRO re??ues sur Terre. Le forfait comprend ??galement acc??l??rom??tres embarqu??s sensibles utilis??s pour d??duire la densit?? atmosph??rique de Mars situ pendant a??rofreinage.
Le Electra est un logiciel de radio UHF d??fini, con??u pour communiquer avec d'autres engins spatiaux ?? mesure qu'ils approchent, la terre, et d'exploiter sur Mars. En plus de protocole contr??l?? inter-vaisseaux spatiaux liaisons de donn??es de 1 kbit / s ?? 2 Mbit / s, Electra fournit ??galement la collecte de donn??es Doppler, l'enregistrement en boucle ouverte et un service de synchronisation tr??s pr??cise bas??e sur une 5e-13 USO. informations Doppler pour les v??hicules qui approchent peut ??tre utilis?? pour le ciblage de descente finale ou de la descente et l'atterrissage trajectoire loisirs. informations Doppler sur les v??hicules d??barqu??s permettra ??galement aux scientifiques de d??terminer avec pr??cision l'emplacement de surface de atterrisseurs et rovers martiens. Les deux MER engin spatial sur Mars actuellement utiliser une version ant??rieure UHF de g??n??ration de relais radio fournissant des fonctions similaires ?? travers l'orbiteur de Mars Odyssey. La radio Electra a prouv?? sa fonctionnalit?? en se appuyant information et de la sonde MER, Phoenix Mars Lander et Curiosit?? rover.
Les images de la cam??ra de navigation optique les lunes martiennes, Phobos et Deimos, contre ??toiles d'arri??re-plan pour d??terminer pr??cis??ment l'orbite de MRO. Bien que l'imagerie de lune ne est pas essentiel ?? la mission, il a ??t?? inclus comme un test de la technologie pour en orbite et l'atterrissage des futurs engins spatiaux. La cam??ra de navigation optique a ??t?? test?? avec succ??s en F??vrier et Mars 2006. Il ya une proposition de recherche pour les petites lunes, anneaux de poussi??re et de vieux orbiteurs avec elle.
des donn??es d'ing??nierie

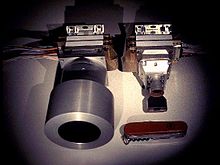
Structure
Les travailleurs de Lockheed Martin Space Systems ?? Denver assembl?? la structure de l'engin spatial et attach?? les instruments. Les instruments ont ??t?? construits au Jet Propulsion Laboratory, le Universit?? de l'Arizona Lunar and Planetary Laboratory Tucson, Arizona, Universit?? Johns Hopkins Applied Physics Laboratory dans Laurel, Maryland, le Agence spatiale italienne ?? Rome, et Malin Space Systems Sciences ?? San Diego. Le co??t total de l'engin spatial ??tait de 720 millions de dollars am??ricains.
La structure est compos??e essentiellement de composites de carbone et plaques d'aluminium alv??ol??-. Le titane r??servoir de carburant occupe la majeure partie du volume et de la masse de l'engin spatial et fournit la majeure partie de sa l'int??grit?? structurelle. Totale de l'engin spatial de masse est inf??rieure ?? 2180 kg (4806 lb) avec une unfueled masse s??che moins de 1 031 kg (?? 2,273).
syst??mes ??lectriques

MRO obtient tout de son ??lectricit?? ?? partir de deux les panneaux solaires, chacune d'elles pouvant se d??placer de fa??on ind??pendante autour de deux axes (de haut en bas, ou de rotation gauche-droite). Chaque panneau solaire mesure 5,35 x 2,53 m et a 9,5 m 2 (102 pi 2) couvertes de 3744 cellules photovolta??ques individuels. Son haut rendement cellules solaires ?? triple jonction sont capables de convertir plus de 26% de l'??nergie du soleil directement en ??lectricit?? et sont reli??s ensemble pour produire une puissance totale de 32 volts . En Mars, chacun des panneaux produit plus de 1000 watts de puissance; en revanche, les panneaux g??n??reraient 3000 watts en orbite terrestre comparable en ??tant plus proche du Soleil
MRO a deux batteries rechargeables nickel-hydrog??ne utilis??s pour alimenter le vaisseau spatial quand il ne est pas expos?? au soleil. Chaque pile a une capacit?? de stockage d'??nergie de 50 amp??res-heure (180 Kc). La gamme compl??te des batteries ne peut pas ??tre utilis?? en raison de contraintes de tension sur le vaisseau spatial, mais permet aux op??rateurs d'??tendre la vie de la batterie-une capacit?? pr??cieuse, ??tant donn?? que la fuite de la batterie est une des causes les plus fr??quentes de d??faillance d'un satellite ?? long terme. Planificateurs pr??voient que seulement 40% des capacit??s des batteries sera n??cessaire au cours de la dur??e de vie de l'engin spatial.
Syst??mes ??lectroniques
Ordinateur principal de MRO est un 133 MHz, 10,4 millions transistor, de 32 bits, RAD750 processeur. Ce processeur est un Version durcie par irradiation d'un PowerPC 750 ou Processeur G3 avec un sp??cialement construit la carte m??re. Le RAD750 est un successeur au RAD6000. Ce processeur peut sembler faible puissance par rapport ?? un moderne PC processeur, mais il est extr??mement fiable, souple, et peut fonctionner dans solar flare-ravag?? l'espace profond. Le logiciel du syst??me d'exploitation est VxWorks et a suivi des protocoles et de protection contre les d??fauts ??tendus.
Les donn??es sont stock??es dans un 160 Gb (20 Module Go) de m??moire flash compos??e de plus de 700 puces de m??moire, chacune avec une 256 La capacit?? Mbit. Cette capacit?? de m??moire ne est pas en fait que compte tenu de la grande quantit?? de donn??es devant ??tre acquis; par exemple, une seule image de la cam??ra HiRISE peut ??tre aussi grand que 28 Gb.
d??termination d'attitude
Afin de d??terminer l'orbite de l'engin spatial et faciliter les man??uvres, seize capteurs solaires - huit primaires et huit sauvegardes - sont plac??s autour de la sonde ?? calibrer direction solaire par rapport au cadre de l'orbiteur. Deux suiveurs stellaires, cam??ras num??riques utilis??es pour cartographier la position de catalogu??s ??toiles , de fournir ?? la NASA compl??te, trois axes connaissance de l'orientation de l'engin spatial et l'attitude. Un primaire et de sauvegarde Unit?? de mesure inertielle miniature (Mimu), fourni par Honeywell, mesure les variations de l'attitude de l'engin spatial, ainsi que toute modification non induites par gravit?? ?? sa vitesse lin??aire. Chaque Mimu est une combinaison de trois acc??l??rom??tres et trois anneaux laser gyroscopes. Ces syst??mes sont tous extr??mement important de MRO, car il doit ??tre capable de pointer sa cam??ra ?? une tr??s grande pr??cision afin de prendre des photos de haute qualit?? que la mission a besoin. Il a ??galement ??t?? sp??cialement con??u pour minimiser les vibrations sur le vaisseau spatial, de mani??re ?? permettre ?? ses instruments pour prendre des images sans distorsions caus??es par les vibrations.
Syst??me de t??l??communications

Le sous-syst??me Telecom sur MRO est le meilleur syst??me de communication num??rique envoy?? dans l'espace profond ?? ce jour et pour la premi??re fois en utilisant la capacit?? approche turbo-codes. Il se compose d'un tr??s grand (3 m??tres) de l'antenne, qui est utilis?? pour transmettre des donn??es par l'interm??diaire du Deep Space Network via Fr??quences en bande X ?? 8 GHz, et elle illustre l'utilisation de la K une bande ?? 32 GHz pour des d??bits plus ??lev??s. Vitesse de transmission maximale de Mars devrait ??tre aussi ??lev?? que 6 Mbit / s, un taux dix fois plus ??lev?? que les pr??c??dents orbiteurs Mars. La sonde porte deux en bande X 100 watts amplificateurs (dont l'un est une sauvegarde), une de 35 watts K un amplificateur -band, et deux Petits transpondeurs de Deep Space (de SDSTs).
Deux antennes ?? faible gain plus petits sont ??galement pr??sents pour la communication-taux inf??rieur en cas d'urgence et des ??v??nements sp??ciaux, tels que le lancement et Mars Orbit Insertion. Ces antennes ne ont pas des plats de focalisation et peuvent transmettre et recevoir ?? partir de ne importe quelle direction. Ils sont un syst??me de sauvegarde important de veiller ?? ce que MRO peut toujours ??tre atteint, m??me si son antenne principale est point?? loin de la Terre.
Le K un sous-syst??me -band a ??t?? utilis?? pour des fins de d??monstration. En raison de l'absence de spectre ?? 8,41 GHz en bande X, futures ?? haut d??bit missions spatiales profondes utiliseront 32 GHz K a -band. Deep Space Network (DSN) a mis en ??uvre un K -band capacit??s de r??ception ?? tous les trois de ses complexes (Goldstone, Canberra et de Madrid) sur son 34-m faisceau-guide d'ondes (OFEG) antenne sous-r??seau. Au cours de la phase de croisi??re, vaisseau K a t??l??m??trie -band a ??t?? suivi 36 fois par ces antennes prouvant fonctionnalit?? ?? toutes les antennes. K A -BAND essais ont ??t?? ??galement pr??vues au cours de la phase de la science, mais pendant a??rofreinage un commutateur ??chou??, limitant l'antenne ?? gain ??lev?? en bande X ?? un seul amplificateur. Si cet amplificateur ??choue toutes les communications en bande X ?? haute vitesse seront perdues. Le K une liaison descendante est la sauvegarde ne reste pour cette fonctionnalit??, et depuis le K une capacit?? -band de l'un des transpondeurs SDST a d??j?? ??chou??, (et l'autre pourrait avoir le m??me probl??me) JPL a d??cid?? de cesser toute K a -band d??monstrations et d??tiennent la capacit?? restante en r??serve.
Propulsion et contr??le d'attitude

La sonde utilise un 1175 L (310 US gal) r??servoir de carburant rempli avec 1187 kg (?? 2,617) du hydrazine monopropellant. La pression de carburant est r??gul??e en ajoutant de l'h??lium gazeux sous pression provenant d'un r??servoir externe. Soixante-dix pour cent du carburant a ??t?? utilis?? pour l'insertion orbitale.
MRO a vingt propulseurs de moteur de fus??e ?? bord. Six grands propulseurs produisent chaque 170 N (38 lbf) de la pouss??e pour un total de 1 020 N (230 lbf) principalement con??u pour l'insertion orbitale. Ces propulseurs ont ??t?? initialement con??us pour la Mars Surveyor 2001 Lander. Six propulseurs moyennes produisent chaque 22 N (5 lbf) de la pouss??e pour les man??uvres de correction de trajectoire et contr??le d'attitude lors de l'insertion de l'orbite. Enfin, huit petits propulseurs produisent chaque 0,9 N (0,2 lbf) de la pouss??e pour le contr??le d'attitude pendant les op??rations normales.
Quatre roues ?? r??action sont ??galement utilis??s pour le contr??le d'attitude pr??cise au cours des activit??s n??cessitant une plate-forme tr??s stable, comme l'imagerie haute r??solution, dans laquelle m??me les petits mouvements peuvent entra??ner un flou de l'image. Chaque roue est utilis?? pour un axe de mouvement. Le quatri??me (biais??) roue est une sauvegarde au cas o?? l'un des trois autres roues ??choue. Chaque roue p??se 10 kg (22 lb) et peut ??tre fil?? aussi vite que 100 Hz ou 6000 rpm.
D??couvertes et photographies
La glace d'eau dans le chapeau de glace mesur??e
Les r??sultats publi??s en 2009 des mesures radar de la calotte polaire nord ont d??termin?? que le volume de glace d'eau dans le chapeau est 821 000 kilom??tres cubes (197 000 milles cubes), ??gal ?? 30% de la calotte glaciaire du Groenland de la Terre.
Ice expos?? dans de nouveaux crat??res

Un article paru dans la revue Science en Septembre 2009, a indiqu?? que de nouveaux crat??res sur Mars ont fouill?? la glace d'eau relativement pure. Apr??s avoir ??t?? expos??, la glace dispara??t progressivement car il sublime loin. Ces nouveaux crat??res ont ??t?? trouv??s et dat??s par la cam??ra CTX, et l'identification de la glace a ??t?? confirm??e avec le Pacte Imaging Spectrometer (CRISM) ?? bord de la sonde Mars Reconnaissance Orbiter (MRO). La glace a ??t?? trouv?? dans un total de cinq emplacements. Trois de ces emplacements sont en Quadrilat??re Cebrenia. Ces endroits sont 55,57 ?? N 150,62 ?? E 43,28 ?? N 176,9 ?? E et 45 ?? N 164,5 ?? E Deux autres sont en Quadrangle de Diacria: 46,7 ?? N 176,8 ?? E et 46,33 ?? N 176,9 ?? E
Glace dans lob??s tabliers de d??bris

R??sultats de radar de SHARAD sugg??r?? que les caract??ristiques appel??es Tabliers de d??bris lob??s (ADL) contiennent de grandes quantit??s de glace d'eau. D'int??r??t des jours de la Viking Orbiter, ces LDA sont tabliers de mat??riau environnant falaises. Ils ont une topographie convexe et une pente douce; cela sugg??re ??couler de la falaise abrupte source. En outre, lob??s tabliers de d??bris peuvent montrer lin??ations de surface comme des glaciers rocheux sur la Terre. SHARAD a fourni des preuves solides que les ADL dans Hellas Planitia sont les glaciers qui sont couverts d'une fine couche de d??bris (ce est ?? dire les roches et la poussi??re); une forte r??flexion au sommet et la base des ADL a ??t?? observ??e, ce qui sugg??re que la glace d'eau pure constitue l'essentiel de la formation (entre les deux r??flexions). Bas?? sur les exp??riences de l' atterrisseur Phoenix et les ??tudes de la Mars Odyssey en orbite, la glace d'eau est connue pour exister juste sous la surface de Mars dans les hautes latitudes () loin au nord et au sud.
les d??p??ts de chlorure

Utilisant les donn??es de Mars Global Surveyor, Mars Odyssey et Mars Reconnaissance Orbiter de la, les scientifiques ont trouv?? de vastes d??p??ts de min??raux de chlorure. Les preuves sugg??rent que les d??p??ts ont ??t?? form??s ?? partir de l'??vaporation des eaux min??rales enrichies. La recherche sugg??re que les lacs peuvent avoir ??t?? dispers??s sur de vastes zones de la surface martienne. Habituellement chlorures sont les derni??res min??raux ?? venir de la solution. Carbonates, sulfates, et de la silice devraient pr??cipiter devant eux. Sulfates et la silice ont ??t?? trouv??s par les Rovers Mars sur la surface. Lieux avec min??raux de chlorure peuvent avoir une fois occup?? divers formes de vie. En outre, de telles zones pourraient conserver les traces de la vie ancienne.
Autres min??raux aqueuses
En 2009, un groupe de scientifiques de l'??quipe CRISM a rapport?? 9-10 classes diff??rentes de min??raux form??s en pr??sence d'eau. Diff??rents types de argiles (??galement appel??s phyllosilicates) ont ??t?? trouv??s dans de nombreux endroits. Les physilicates identifi??s inclus smectite smectite aluminium, le fer / magn??sium, kaolinite, prehnite et chlorite. Roches contenant du carbonate ont ??t?? trouv??s autour de la Isidis bassin. carbonates appartiennent ?? une classe dans laquelle la vie aurait pu se d??velopper. Les zones autour de Valles Marineris ont ??t?? trouv??s pour contenir hydrat?? de silice et des sulfates hydrat??s. Les chercheurs ont identifi?? les sulfates hydrat??s et min??raux ferriques Terra Meridiani et Valles Marineris. Autres min??raux trouv??s sur Mars ??taient jarosite, alunite, h??matite, opale, et le gypse . Deux ?? cinq des classes de min??raux ont ??t?? form??es avec la droite pH et suffisamment d'eau pour permettre la vie de se d??velopper.
Avalanches
Les Mars Reconnaissance Orbiter CTX et HiRISE cam??ras ont photographi?? un certain nombre d'avalanches hors les escarpements de la calotte polaire nord comme ils se produisaient.

Avalanche martien et de d??bris chutes (HiRISE 2008)

Une photo avec une ??chelle d??montre la taille de l'avalanche.
D'autres engins spatiaux

Image de Phoenix atterrissage sur Mars, comme on le voit par HiRISE. Bien que dans l'image elle semble ??tre descendant dans le crat??re, Phoenix fait atterri ?? 20 km de l??.

L' atterrisseur Phoenix et son bouclier thermique comme on le voit par HiRISE.

Pistes du rover Opportunity, comme on le voit par HiRISE. Les points blancs sont des endroits o?? le rover arr??t?? pour effectuer des observations scientifiques ou tourn??.

Opportunity vu par HiRISE le 29 Janvier, 2009. Opportunity est sur la voie de Endeavour crat??re, ?? 17 km ?? ce point.
Le rover Curiosity lors de l'entr??e atmosph??rique vu par HiRISE le 6 Ao??t 2012. parachute supersonique et backshell visible.
Circuler eau sal??e
Le 4 Ao??t 2011 (sol 2,125), la NASA a annonc?? que MRO d??tect?? ce qui semble ??tre qui coule de l'eau sal??e ?? la surface ou sous la surface de Mars.