{kind=link}

Mars Exploration Rover
Saviez-vous ...
Enfants SOS b??n??voles ont aid?? ?? choisir des articles et ont fait d'autres mat??riels de curriculum m??res SOS chaque regard apr??s une une famille d'enfants parrain??s .

NASA Mars Exploration Rover (MER) Mission s 'est un cours mission robotique d'exploration de Mars , qui a commenc?? en 2003 avec l'envoi de deux rovers - Esprit et Opportunit?? - pour explorer la surface de Mars et de la g??ologie . La mission est dirig??e par le directeur de projet Peter Theisinger de la NASA s ' Jet Propulsion Laboratory et chercheur principal Steven Squyres, professeur d' astronomie ?? Universit?? Cornell.
Primaire parmi les objectifs scientifiques de la mission est de rechercher et de caract??riser un large ??ventail de roches et les sols qui d??tiennent des indices sur l'activit?? de l'eau pass??e sur Mars. La mission fait partie du programme d'exploration de Mars de la NASA qui comprend trois atterrisseurs succ??s pr??c??dents: les deux Viking Landers en 1976 et Pathfinder en 1997.
Le co??t total de la construction, le lancement, d'atterrissage et de fonctionnement des rovers sur la surface pour la premi??re mission premi??re de 90 jours ??tait d'environ 820 millions de dollars. Depuis les rovers fonctionnent encore quatre ans apr??s l'atterrissage, le financement de la mission a ??t?? ??tendue ?? ??peut-??tre jusqu'en 2009". En Juillet 2007, les temp??tes de poussi??re martiens bloqu??e lumi??re du soleil pour les rovers et menac?? la capacit?? de l'engin ?? recueillir l'??nergie gr??ce ?? leur panneaux solaires, provoquant ing??nieurs craignent que l'un ou deux d'entre eux pourrait ??tre une invalidit?? permanente; Cependant, les temp??tes de poussi??re ont lev?? et les deux rovers ont repris leurs op??rations.
En reconnaissance de la grande quantit?? de informations scientifiques amass?? par les deux rovers, deux ast??ro??des ont ??t?? nomm??s en leur honneur: Esprit et 37452 39382 Opportunity.
Chronologie
Le MER-A rover, Spirit, a ??t?? lanc??e le 10 juin, 2003 ?? 17:59 UTC, et MER-B, Opportunit??, sur 7 juillet 2003 ?? 15:18 UTC. Esprit a atterri dans Crat??re Gusev sur 4 janvier 2004 ?? 04h35 Rez UTC. Opportunity a atterri dans la Meridiani Planum sur le c??t?? oppos?? de Mars de l'Esprit, sur 25 janvier 2004 05:05 UTC sol. Dans la semaine suivant l'atterrissage de Spirit ', le site Web de la NASA a enregistr?? 1,7 et 34,6 milliards de visites t??raoctets de donn??es transf??r??es, ??clipsant les records ??tablis par les missions de la NASA pr??c??dentes.


Sur 21 janvier 2004 , le Profonde Space Network a perdu le contact avec l'Esprit, pour des raisons ?? l'origine pens?? pour ??tre li??e ?? un orage sur l'Australie . Le rover transmis un message sans donn??es, mais plus tard ce jour-l?? rat?? une autre session de communication avec le Mars Global Surveyor. Le lendemain, JPL a r??ussi ?? recevoir un bip ?? partir du rover, indiquant qu'il ??tait en d??faut. Le 23, l'??quipe de vol a r??ussi ?? faire le rover envoi. La faute a ??t?? soup??onn?? d'avoir ??t?? caus?? par une erreur dans le rover de M??moire flash sous-syst??me. Le rover n'a accompli aucune des activit??s scientifiques pendant 10 jours, tandis que les ing??nieurs mis ?? jour son logiciel et les tests ont couru. Le probl??me a ??t?? corrig?? en reformatant la m??moire flash de l'Esprit et la mise ?? niveau du logiciel avec un Patch pour ??viter la surcharge de la m??moire; Opportunity a ??galement ??t?? mis ?? jour avec le patch par mesure de pr??caution Esprit retourn?? aux op??rations scientifiques compl??tes par. 5 F??vrier. Cela a ??t?? ?? ce jour l'anomalie la plus grave dans la mission.
Sur 23 mars 2004 , une conf??rence de nouvelles a eu lieu annon??ant ??grandes d??couvertes?? de preuve de liquide au-del?? de l'eau sur la surface martienne. Une d??l??gation de scientifiques a montr?? des images et des donn??es qui r??v??lent un mod??le stratifi?? et literie croix dans les roches de l'affleurement l'int??rieur d'un crat??re dans Meridiani Planum, site d'atterrissage de MER-B, Opportunit??, ce qui sugg??re que l'eau coulait dans la r??gion. La distribution irr??guli??re de chlore et de brome sugg??re ??galement que le lieu ??tait autrefois le rivage d'une mer sal??e, maintenant ??vapor??.
Sur 8 avril 2004 , la NASA a annonc?? qu'il prolongeait la vie de la mission des rovers 3-8 mois. Il a imm??diatement fourni un financement suppl??mentaire de 15 millions de dollars ?? Septembre, et 2,8 millions de dollars par mois pour les activit??s poursuivies.
Sur 30 avril 2004 , Opportunity arriv?? ?? Endurance crat??re, prenant environ 5 jours pour conduire les 200 m??tres.
Sur 22 septembre 2004 , la NASA a annonc?? qu'il prolongeait la vie de la mission des rovers pendant encore six mois. Opportunity ??tait de laisser crat??re Endurance, visitez son bouclier thermique mis au rebut, et de proc??der ?? Victoria crat??re. Esprit ??tait de tenter de monter au sommet de la Columbia Hills.
Sur 6 avril 2005 , avec les deux rovers encore bien fonctionner, la NASA a annonc?? une autre extension de 18 mois de la mission ?? Septembre 2006. Possibilit?? ??tait de visiter le "grav?? relief?? et Esprit ??tait de monter une pente rocheuse vers le haut de Husband Hill.
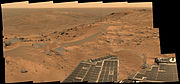
Sur 21 ao??t 2005 , Esprit a atteint le sommet de Husband Hill apr??s 581 sols et un parcours de 4,81 km (2,99 mi).
Esprit a c??l??br?? son premier anniversaire martien ann??e (669 sols ou 687 jours terrestres) sur 20 novembre, 2005 . Opportunity a c??l??br?? son anniversaire le D??cembre 12. Au d??but de la mission, il a ??t?? pr??vu que les rovers ne pourraient pas survivre beaucoup plus longtemps que 90 jours. Les Columbia Hills ??taient ??juste un r??ve??, selon pilote rover Chris Leger.
Sur 7 f??vrier 2006 , Esprit atteint la formation rocheuse appel??e semi-circulaire Home Plate. Ce est un affleurement rocheux couches qui intrigue et excite les scientifiques. On pense que ses roches sont des d??p??ts volcaniques explosives, bien que d'autres possibilit??s existent, y compris les d??p??ts d'impact ou Fanfare / hydriques s??diments.
Sur 13 mars 2006 , la roue avant droite de Spirit cess?? de travailler alors que le rover a ??t?? se d??place vers McCool Hill. Ses pilotes ont tent?? de faire glisser la roue mort derri??re Esprit, mais cela ne travaillaient jusqu'?? atteindre une zone de sable impraticables sur les pentes inf??rieures. Pilotes dirig??s Esprit une caract??ristique de pente plus faible, surnomm?? "Low Ridge Haven", o?? elle a pass?? le long hiver martien, en attendant le printemps et l'augmentation des niveaux de puissance solaires appropri??es pour la conduite.
Sur 26 septembre 2006 , Spaceflight Now a signal?? que la NASA a prolong?? la mission pour les deux rovers ?? Septembre 2007. Le 27 septembre 2006 , Opportunity a atteint le bord de Crat??re Victoria.
Esprit avait dur?? plus de 1 000 jours martiens explorer le crat??re de Gusev que des 25 octobre, 2006 . Opportunit?? avait dur?? plus de 1 000 jours martiens explorer Meridiani Planum que des 16 novembre, 2006 . En 24 janvier 2007 , les rovers sur Mars avait dur?? plus de trois ans. (Bien que Opportunity a atterri sur 25 janvier de l'ann??e 2004 a ??t?? une ann??e bissextile.)
Sur 6 f??vrier 2007 , Opportunity est devenu le premier vaisseau spatial ?? parcourir 10 000 m??tres - 10 km - sur la surface de Mars.
Sur 28 juin, 2007 , Opportunity a ??t?? le point d'entrer crat??re Victoria de son perchoir sur le bord de Duck Bay., mais en raison de vastes temp??tes de poussi??re, il a ??t?? report??e ind??finiment jusqu'?? ce que la poussi??re se ??tait ??clairci et la puissance retourn??e ?? des niveaux s??rs.
Sur 28 ao??t 2007 , Spirit et Opportunity reprend le volant apr??s avoir hunkering bas pendant que gronde la temp??te de poussi??re qui limitaient l'??nergie solaire ?? un niveau qui a failli provoquer l'??chec permanent des deux rovers.
Sur 1er octobre 2007 , ?? la fois Spirit et Opportunity entr?? dans leur cinqui??me prolongation de la mission qui pourrait prolonger les op??rations en 2009, permettant aux rovers d'avoir pass?? cinq ans ?? explorer la surface de Mars, en attendant leur survie.
Sur 3 janvier 2008 , Esprit est entr?? dans sa quatri??me ann??e d'exploration de Crat??re Gusev.
la conception de l'engin spatial




Le Mars Exploration Rover a ??t?? con??u pour ??tre rang?? dans le nez d'un Fus??e Delta II. Chaque satellite est compos?? de plusieurs ??l??ments:
- Rover: 185 kg (408 lb)
- Lander: 348 kg (?? 767)
- Backshell / Parachute: 209 kg (461 lb)
- Bouclier thermique: 78 kg (172 lb)
- Cruise ??tape: 193 kg (425 lb)
- Propulseur: 50 kg (110 lb)
La masse totale est 1063 kg (?? 2,343).
phase de croisi??re
La phase de croisi??re est la composante de l'engin qui est utilis?? pour Voyage de la Terre ?? Mars. Il est tr??s similaire ?? la Mars Pathfinder dans la conception et est d'environ 2,65 m??tres (8,7 pi) de diam??tre et 1,6 m (5,2 pi) de hauteur, y compris le v??hicule d'entr??e (voir ci-dessous).
La structure primaire est en aluminium avec un anneau externe de nervures couverte par le des panneaux solaires, qui sont d'environ 2,65 m (8,7 ft) de diam??tre. Divis?? en cinq sections, les panneaux solaires peuvent fournir jusqu'?? 600 Watts de puissance pr??s de la Terre et de 300 W ?? Mars.
Radiateurs et Isolation multicouches garder l'??lectronique "chaud". Un syst??me de fr??on ??limine la chaleur de l'ordinateur de vol et de mat??riel de communication ?? l'int??rieur du rover afin qu'ils ne pas surchauffer. Cruise syst??mes avioniques permettent ?? l'ordinateur de vol pour se interfacer avec d'autres appareils ??lectroniques tels que les capteurs solaires, scanner ??toiles et appareils de chauffage.
Le scanner ??toiles (avec un syst??me de sauvegarde) et capteur soleil a permis ?? la sonde de conna??tre son orientation dans l'espace en analysant la position du Soleil et des ??toiles par rapport ?? lui-m??me. Parfois, l'engin pourrait ??tre l??g??rement hors cours; ce ??tait pr??visible, ??tant donn?? le voyage 500.000.000 km (soit 320 millions mile). Ainsi navigateurs pr??vues jusqu'?? six man??uvres de correction de trajectoire, ainsi que les ch??ques de sant??.
Pour assurer le vaisseau spatial est arriv?? ?? Mars dans le bon endroit pour son atterrissage, deux poids l??ger, r??servoirs ??tanches en aluminium a transport?? environ 31 kg (environ 68 lb) de hydrazine propulseur. Avec les syst??mes de croisi??re d'orientation et de contr??le, le propulseur a permis navigateurs pour maintenir le vaisseau spatial sur la bonne voie. Br??lures et de l??gumineuses tirs du propulseur droit ?? trois types de man??uvres:
- Une br??lure axiale utilise des paires de propulseurs pour changer la vitesse de l'engin spatial;
- Une br??lure lat??rale utilise deux ??grappes de propulseurs" (quatre propulseurs par grappe) pour d??placer le vaisseau spatial "lat??ralement" par seconde-impulsions longues;
- mode de tir Pulse utilise des paires de propulseurs coupl??s pour les satellites man??uvres de pr??cession (tours).
Communication
Le vaisseau spatial utilis?? ?? haute fr??quence Bande X la radio longueur d'onde pour communiquer, ce qui a permis moins de puissance et plus petit antennes que de nombreuses embarcations plus, qui a utilis?? S bande.
Navigateurs envoy?? commandes via deux antennes sur la sc??ne de croisi??re: une croisi??re antenne ?? faible gain mont?? ?? l'int??rieur de la bague int??rieure, et une antenne ?? gain moyen de croisi??re dans la bague ext??rieure. L'antenne ?? faible gain a ??t?? utilis?? pr??s de la Terre. Il est omnidirectionnel, si la puissance d'??mission qui atteint la terre est tomb?? rapidement avec la distance. Comme l'engin se rapproche de Mars, le Soleil et la Terre se sont rapproch??s dans le ciel comme vu de l'engin, donc moins d'??nergie atteint la Terre. Ensuite, la sonde passe ?? l'antenne ?? gain moyen, qui a dirig?? la m??me quantit?? de puissance de transmission en un faisceau serr?? vers la Terre.
Pendant le vol, le vaisseau spatial ??tait spin-stabilis??e avec un taux de 2 tours de spin. Mises ?? jour p??riodiques conserv??s antennes point??es vers la Terre et des panneaux solaires vers Sun.
Aeroshell
Le aeroshell form?? un rev??tement protecteur pour l'atterrisseur lors de la sept mois voyage vers Mars. Avec l'atterrisseur et le rover, il constituait le ??v??hicule d'entr??e". Son but principal ??tait de prot??ger l'atterrisseur et le rover ?? l'int??rieur de l'??chauffement, de l'entr??e dans l'atmosph??re martienne fine. Il est bas?? sur les conceptions Mars Pathfinder et Mars Viking.
Parties
Le aeroshell a ??t?? faite de deux parties principales: un bouclier de chaleur et d'un capot. Le bouclier thermique ??tait plat et brun, et prot??g?? de l'atterrisseur et le mobile de la chaleur intense de l'entr??e dans l'atmosph??re martienne et a agi comme le premier a??rofrein pour le vaisseau spatial. La coque arri??re ??tait grande, et peint en blanc en forme de c??ne. Il a port?? le parachute et plusieurs composants utilis??s dans les ??tapes ult??rieures de l'entr??e, la descente et l'atterrissage, y compris:
- Un parachute (arrim?? ?? la partie sup??rieure de la coque arri??re);
- L'??lectronique pour capots et batteries qui tirent hors dispositifs pyrotechniques comme les noix de s??paration, des roquettes et au mortier en parachute;
- Une unit?? Litton LN-200 mesure inertielle (IMU), qui surveille et signale l'orientation de la coque arri??re comme il balance sous le parachute;
- Trois grandes moteurs solides de roquettes appel??s fus??es RAD (Rocket de descente assist??e), chacun fournissant environ une tonne de la force (10 kilonewtons) pendant plus de deux secondes;
- Trois petites fus??es solides appel??s TIRS (mont??s afin qu'ils visent horizontalement les c??t??s de la coque arri??re) qui fournissent un petit coup horizontale ?? la coque arri??re pour aider ?? orienter l'backshell plus verticalement pendant la principale fus??e br??lure RAD.
Composition
Construit par Lockheed Martin Astronautics Co. ?? Denver, Colorado, le aeroshell est faite d'une structure en aluminium en nid d'abeille en sandwich entre graphite-??poxy feuilles de surface. L'ext??rieur de l'aeroshell est recouverte d'une couche d' ph??nolique nid d'abeilles. Ce nid d'abeille est remplie d'un Mat??riau ablatif (??galement appel?? ??mat??riau d'ablation??), qui dissipe la chaleur g??n??r??e par le frottement atmosph??rique.
Le ablateur lui-m??me est un m??lange unique de li??ge bois , liant et de nombreux petits silice sph??res de verre. Il a ??t?? invent?? pour les boucliers thermiques effectu??es sur les missions d'atterrisseurs Viking Mars. Une technologie similaire a ??t?? utilis??e dans la premi??re US missions spatiales habit??es Le mercure, Gemini et Apollo. Il a ??t?? sp??cialement formul?? pour r??agir chimiquement avec l'atmosph??re martienne lors de l'entr??e et ??vacuer la chaleur loin, laissant un sillage chaud de gaz derri??re le v??hicule. Le v??hicule a ralenti, passant 19000 km / h (environ 12 000 mph) ?? environ 1600 kilom??tres par heure (1000 mph) en environ une minute, produisant environ 60 m / s?? (6 g) de l'acc??l??ration sur l'atterrisseur et le mobile.
La coque arri??re et le bouclier de chaleur sont faits des m??mes mat??riaux, mais le bouclier thermique a une ??paisseur 1/2 pouce (12,7 mm) de la couche ablateur. Aussi, au lieu d'??tre peint, la coque arri??re a ??t?? recouvert d'une tr??s mince aluminis?? PET couverture pour le prot??ger du froid de l'espace profond. La couverture vaporis?? au cours Mars entr??e dans l'atmosph??re.
Parachute

Le parachute contribu?? ?? ralentir le vaisseau spatial lors de l'entr??e, la descente et l'atterrissage. Il est situ?? dans la coque arri??re.
Conception
La conception de parachute 2003 faisait partie d'une technologie de parachute Mars ?? long terme des efforts de d??veloppement et est bas?? sur les dessins et l'exp??rience des missions Viking et Pathfinder. Le parachute de cette mission est de 40% plus grande que Pathfinder est parce que la plus grande charge pour le Mars Exploration Rover est de 80 ?? 85 kilonewtons (kN) ou 18 000 ?? 19 000 lbf (85 kN) lorsque le parachute se gonfle pleinement. En comparaison, les charges d'inflation de Pathfinder ??taient environ 35 kN (environ 8000 lbf). Le parachute a ??t?? con??ue et construite South Windsor, Connecticut par Pioneer Aerospace ( site), la soci??t?? qui a ??galement con??u le parachute pour le Mission Stardust.
Composition
Le parachute est fait de deux tissus l??gers, durables: polyester et nylon. Une bride triple en Kevlar relie le parachute ?? la coque arri??re.
La quantit?? d'espace disponible sur le vaisseau spatial pour le parachute est si petite que le parachute a d?? ??tre la pression emball??. Avant le lancement, une ??quipe bien pli?? les 48 lignes de suspension, trois lignes de frein, et le parachute. L'??quipe de parachutistes charg?? le parachute dans une structure sp??ciale qui a ensuite appliqu?? un poids lourd pour le paquet de parachute ?? plusieurs reprises. Avant de placer le parachute dans la coque arri??re, le parachute a ??t?? r??gl?? ?? la chaleur st??riliser.
Syst??mes connect??s

Zylon Brides: Apr??s le parachute a ??t?? d??ploy?? ?? une altitude d'environ 10 km (6 milles) au-dessus de la surface, le bouclier thermique a ??t?? lib??r?? en utilisant six ??crous de s??paration et de push-off ressorts. L'atterrisseur ensuite s??par??e de la coque arri??re et ??descendu en rappel" vers le bas d'une bande de m??tal sur un syst??me de freinage centrifuge construit dans l'un des p??tales de L??nder. La lente descente vers le bas la bande m??tallique plac?? l'atterrisseur en position ?? la fin d'une autre bride (attache), en un pr??s de 20 m (65 pi) de long tress??e Zylon.
Zylon est un mat??riau de fibre avanc??e similaire ?? Kevlar qui est cousue dans un mod??le de sangle (comme mat??riau de lacet) pour la rendre plus forte. La bride Zylon fournit l'espace pour le d??ploiement de l'airbag, la distance du flux d'??chappement du moteur ?? propergol solide, et une stabilit?? accrue. La bride int??gre un harnais ??lectrique qui permet la mise ?? feu des fus??es ?? combustible solide de la coque arri??re ainsi que fournit des donn??es de l'unit?? de mesure inertielle de cosse arri??re (qui mesure la fr??quence et l'inclinaison de l'engin spatial) ?? l'ordinateur de vol dans le rover.
Rocket descente assist??e (RAD): moteurs. Parce que la densit?? atmosph??rique de Mars est inf??rieure ?? 1% de la Terre, le parachute seule ne pouvait pas ralentir le Mars Exploration Rover suffisant pour assurer un coffre-fort, une faible vitesse d'atterrissage. La descente de l'engin spatial a ??t?? assist?? par des roquettes qui ont amen?? le vaisseau spatial ?? une mort arr??t 10-15 m (30-50 pi) au-dessus de la surface martienne.
Unit?? de l'altim??tre radar: Un radar unit?? de l'altim??tre a ??t?? utilis?? pour d??terminer la distance ?? la surface martienne. L'antenne du radar est install?? dans l'un des coins inf??rieurs du t??tra??dre de l'atterrisseur. Lorsque la mesure de radar a montr?? que l'atterrisseur ??tait la distance correcte au-dessus de la surface, la bride Zylon a ??t?? coup??, lib??rant l'atterrisseur de la parachute et coque arri??re de sorte qu'il ??tait libre et clair pour l'atterrissage. Les donn??es radar a ??galement permis ?? la s??quence de calage sur l'inflation et airbag backshell RAD tirs de roquettes.
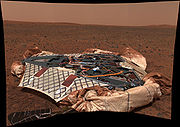
Airbags

Airbags utilis?? dans la mission Mars Exploration Rover sont du m??me type que Mars Pathfinder utilis?? en 1997. Ils devaient ??tre assez forte pour amortir le vaisseau spatial se il a atterri sur les rochers ou terrain accident?? et lui permettre de rebondir ?? travers la surface de Mars ?? des vitesses d'autoroute apr??s l'atterrissage. Les airbags ont d?? ??tre gonfl?? secondes avant le toucher et d??gonfl?? fois en toute s??curit?? sur le terrain.
Les airbags ont ??t?? faites de Vectran, comme ceux sur Pathfinder. Vectran a presque le double de la force d'autres mat??riaux synth??tiques, tels que le Kevlar, et donne de meilleurs r??sultats ?? des temp??ratures froides. Six 100 denier (10 mg / m) des couches de protection Vectran une ou deux vessies internes de Vectran ?? 200 deniers (20 mg / m). Utilisation de 100 deniers (10 mg / m) laisse plus de tissu dans les couches externes o?? elle est n??cessaire, car il ya plus de discussions dans l'armure.
Chaque Rover quatre airbags avec six lobes chacun, qui ont tous ??t?? reli??s. Connection ??tait important, car il a aid?? faiblit certaines des forces de d??barquement en gardant le syst??me de sac souple et sensible ?? la pression au sol. Les coussins gonflables ne ont pas ??t?? fix??es directement sur le mobile, mais ont eu lieu ?? elle par des cordes qui sillonnent la structure de sac. Les cordes ont la forme de sacs, ce qui rend plus facile l'inflation. Pendant le vol, les sacs ??taient rang??s avec trois g??n??rateurs de gaz qui sont utilis??s pour l'inflation.
Lander

L'atterrisseur de l'engin spatial est une ??coquille?? de protection qui abrite le rover et la prot??ge, avec les coussins gonflables, des forces d'impact.
L'atterrisseur est un t??tra??dre forme dont les c??t??s ouverts comme des p??tales. Il est solide et l??ger, et fait de poutres et de feuilles. Les faisceaux sont constitu??s de couches de Fibre de graphite tiss?? en un tissu qui est plus l??ger que l'aluminium et plus rigide que l'acier . les raccords de titane sont coll??s et mont??s sur les poutres ?? lui permettre d'??tre boulonn??es ensemble. Le rover a eu lieu ?? l'int??rieur de l'atterrisseur par boulons et ??crous sp??ciaux qui ont ??t?? lib??r??s apr??s l'atterrissage de petits explosifs.
Redressement
Apr??s l'atterrisseur arr??t?? rebondissant et roulant sur le sol, il se est immobilis?? sur la base du t??tra??dre ou un de ses c??t??s. Ensuite, les c??t??s se ouvrent pour faire la base horizontale et verticale du rover. Les c??t??s sont reli??s ?? la base par des charni??res, dont chacune a un moteur suffisamment puissant pour soulever l'atterrisseur. L'atterrisseur rover ainsi a une masse d'environ 533 kg (1 175 livres). Le rover seule p??se environ 185 kg (408 lb). La gravit?? sur Mars est d'environ 38% de la Terre, afin que le moteur n'a pas besoin d'??tre aussi puissant comme il le ferait sur Terre.
Le rover contient acc??l??rom??tres pour d??tecter de quel c??t?? est le bas (vers la surface de Mars) en mesurant la force de gravit??. L'ordinateur mobile commandait alors le p??tale de atterrisseur correcte pour ouvrir de placer le rover verticale. Une fois le p??tale de base a diminu?? et le rover ??tait debout, les deux autres p??tales ont ??t?? ouverts.
Les p??tales initialement ouvert ?? une position tout aussi plat, afin que tous les c??t??s de l'atterrisseur ??taient directement et de niveau. Les moteurs de p??tales sont assez fort de sorte que si deux des p??tales viennent se reposer sur les rochers, la base avec le rover se tiendrait en place comme un pont au-dessus du sol. La base tiendra ?? un niveau encore plus ?? la hauteur des p??tales reposant sur les rochers, faisant une surface plane droite sur toute la longueur de l'ouverture, aplati atterrisseur. L'??quipe de vol sur Terre pourrait alors envoyer des commandes au mobile pour ajuster les p??tales pour cr??er un chemin s??r pour le rover pour chasser l'atterrisseur et sur la surface martienne sans d??poser un rocher escarp??.
D??placement de la charge utile sur Mars
Le d??placement du rover hors l'atterrisseur est appel?? la phase de sortie de la mission. Le rover doit ??viter d'avoir ses roues pris dans le mat??riel d'airbag ou de tomber d'une pente abrupte. Pour aider ?? cela, un syst??me de r??traction sur les p??tales tra??ne lentement les airbags vers l'atterrisseur avant que les p??tales ouverts. Petites rampes sur le ventilateur de p??tales sur pour remplir les espaces entre les p??tales. Ils couvrent un terrain accident??, les obstacles de rock, et du mat??riel de l'airbag, et forment une zone circulaire d'o?? le rover peut chasser dans plusieurs directions. Ils abaissent ??galement l'??tape que le rover doit descendre. Ils sont surnomm??s "batwings", et sont faits de tissu Vectran.
Environ trois heures ont ??t?? attribu??s ?? r??tracter les airbags et d??ployer les p??tales de L??nder.
Conception Rover

Les rovers sont six roues, robots solaires qui se distinguent 1,5 m (4,9 pi) de hauteur, 2,3 m (7,5 pi) de largeur et 1,6 m (5,2 pi) de long. Ils p??sent 180 kg (400 lb), 35 kg (80 lb) de qui est le syst??me de roue et suspension.
Syst??me d'entra??nement
Chaque rover a six roues mont??es sur un syst??me de suspension rocker-bogie qui assure roues restent au sol pendant la conduite sur un terrain accident??. La conception r??duit l'amplitude des mouvements du corps de rover de moiti??, et permet au mobile de passer par dessus les obstacles ou ?? travers des trous qui sont plus d'un diam??tre de la roue (250 mm ou 10 pouces) en taille. Chaque roue dispose ??galement crampons, pour une pr??hension pour l'escalade dans le sable mou et de brouillage sur les rochers.
Chaque roue poss??de son propre moteur. Les deux avant et deux roues arri??re ont chacune moteurs de direction individuels. Cela permet au v??hicule de tourner sur place, un tour complet, et une embard??e et la courbe, faisant des virages arqu??es. Le rover est con??u pour r??sister ?? une inclinaison de 45 degr??s dans ne importe quelle direction sans se renverser. Toutefois, le rover est programm?? ?? travers ses "limites de protection de d??faut?? dans son logiciel risque d'??vitement pour ??viter de d??passer les inclinaisons de 30 degr??s.
Chaque rover peut tourner une de ses roues avant en place pour rectifier en profondeur dans le terrain. Il est de rester immobile pendant que la roue de creusement tourne.
Le rover a une vitesse sup??rieure sur un sol dur plat de 50 mm / s (2 po / s). Mais sa vitesse moyenne est de 10 mm / s, car son logiciel d'??vitement des risques entra??ne l'arr??t de toutes les 10 secondes pendant 20 secondes pour observer et comprendre le terrain, il a entra??n?? dans.
syst??mes ??lectriques et ??lectroniques
Lorsqu'il sera enti??rement illumin??, le rover panneaux solaires g??n??rent environ 140 watts pour un maximum de quatre heures par jour martien ( sol). Le rover a besoin d'environ 100 watts ?? conduire. Son syst??me d'alimentation comprend deux rechargeable batteries au lithium-ion pesant 7,15 kg (16 livres) chacune, qui fournissent l'??nergie quand le soleil ne brille pas, surtout la nuit. Au fil du temps, les batteries se d??gradent et ne seront pas en mesure de recharger ?? pleine capacit??.
A titre de comparaison, l'avenir Mars Science Laboratory devrait durer environ une ann??e martienne en utilisant g??n??rateurs thermo??lectriques radio-isotopiques pour alimenter ses nombreux instruments. Les panneaux solaires sont ??galement envisag??es, mais RTG offrent une polyvalence ?? travailler dans des environnements sombres et hautes latitudes o?? l'??nergie solaire ne est pas un moyen efficace de produire de l'??nergie.
On a pens?? que la fin de la mission de 90 sol, la capacit?? des panneaux solaires pour g??n??rer de l'??nergie serait vraisemblablement r??duite ?? environ 50 watts. Cela ??tait d?? ?? la couverture de la poussi??re pr??vu sur les panneaux solaires, et le changement de saison. Mais plus de trois ans plus tard de la Terre, les blocs d'alimentation les rovers oscill?? entre 300 watt-heure et 900 watts-heure par jour, en fonction de la couverture de la poussi??re. Des ??v??nements de nettoyage (probablement de vent) ont eu lieu le plus souvent la NASA devrait, en gardant les tableaux relativement libre de poussi??re et de prolonger la vie de la mission. Pendant une temp??te de poussi??re sur Mars mondiale 2007, les deux rovers ont connu certains des plus bas de la puissance de la mission; Opportunity a chut?? ?? ?? peine 128 watts-heure.
Les rovers courent un VxWorks syst??me d'exploitation embarqu?? sur un 20 durci par rayonnement MHz RAD6000 CPU 128 avec MB de DRAM avec d??tection et correction d'erreur et 3 Mo de EEPROM. Chaque rover a ??galement 256 Mo de m??moire flash. Pour survivre pendant toutes les diff??rentes phases de la mission, instruments vitaux du rover doivent rester dans une temp??rature de -40 ?? C ?? +40 ?? C (-40 ?? F ?? 104 ?? F). La nuit, les rovers sont chauff??es par huit radio-isotope unit??s de chauffage (ULR), qui g??n??rent chacun une permanence W d'??nergie thermique de la d??sint??gration du radio-isotopes, le long avec des radiateurs ??lectriques qui ne fonctionnent que lorsque cela est n??cessaire. Une pulv??risation cathodique d'or et une couche de pellicule de silice a??rogel sont utilis??s pour l'isolation.
Communication
Le rover a une ?? faible gain et un antenne ?? gain ??lev??. L'antenne ?? faible gain est omnidirectionnelle, et transmet les donn??es ?? un taux faible ?? Profondes Space Network (DSN) antennes sur Terre. L'antenne ?? gain ??lev?? est directionnel et orientable, et peut transmettre des donn??es ?? la Terre ?? une vitesse sup??rieure.
Les rovers utilisent ??galement les antennes ?? faible gain de communiquer avec des engins spatiaux en orbite autour de Mars, Mars Odyssey et (avant son ??chec) du Mars Global Surveyor. Les orbiteurs transmettent des donn??es depuis et vers la Terre; la plupart des donn??es ?? la Terre est relay??e par Odyssey. Les avantages d'utiliser les orbiteurs sont qu'ils sont plus proches des rovers que les antennes sur la Terre, et ont une vue de la Terre depuis bien plus longtemps que les rovers. Les orbiteurs communiquent avec les rovers utilisant des antennes UHF, qui ont une port??e plus courte que les antennes basse et haute-gain. Une antenne UHF est sur le mobile et l'on est sur un p??tale de l'atterrisseur pour aider ?? obtenir des informations lors de l'??v??nement d'atterrissage critique.
Les rovers ont un total de 18 cam??ras, qui produisent 1024 pixels par 1024 pixels des images ?? 12 bits par pixel, mais la plupart des images sont tronqu??s ?? huit bits par pixel. Ils sont ensuite compress??es ?? l'aide ICER avant d'??tre stock?? et envoy?? sur Terre. Navigation, vignettes, et bien d'autres types d'images sont compress??s ?? environ 1 bit / pixel. Des d??bits inf??rieurs (moins de 0,5 bits / pixel) sont utilis??s pour certaines longueurs d'onde multi-couleurs des images panoramiques.
ICER est bas??e sur les ondelettes, et a ??t?? con??u sp??cifiquement pour les applications dans l'espace lointain. Il produit compression progressive, ?? la fois sans perte et avec perte, et int??gre un syst??me de confinement d'erreur de limiter les effets de la perte de donn??es sur le canal de l'espace lointain. Il surpasse la perte d'image JPEG sans perte compresseur et le compresseur riz utilis?? par la mission MPF.
Instrumentation scientifique

Le rover dispose de divers instruments. Trois sont mont??s sur un ensemble:
- Cam??ra panoramique (Pancam), pour d??terminer la texture, la couleur, min??ralogie, et la structure du terrain local.
- Appareil de navigation (Navcam), qui poss??de champ de vue plus ??lev?? mais une r??solution plus faible et est monochromatique, pour la navigation et la conduite.
- Un miroir pour l'??mission thermique miniature Spectrometer (Mini-TES), qui identifie roches et des sols prometteurs pour un examen plus approfondi, et d??termine les processus qui les ont form??s. Il a ??t?? construit par Arizona State University. Voir la principale Article Mini-TES.
Les cam??ras sont mont??es 1,5 m??tres de haut sur le m??t Pancam Assembl??e. Un moteur tourne l'ensemble horizontalement un tour complet. Un autre des points les cam??ras verticalement, au plus droite Haut ou Bas. Un troisi??me points moteurs Mini-TES, jusqu'?? 30 ?? au-dessus de l'horizon et 50 ?? au-dessous. L'ensemble a ??t?? construit par Ball Aerospace & Technologies Corp., Boulder, Colorado, comme ce fut le haut-antenne ?? gain cardan (HGAG).
Quatre cam??ras de danger monochromatiques ( Hazcams) sont mont??s sur le corps du robot, deux ?? l'avant et deux ?? l'arri??re.
Le dispositif de d??ploiement de l'instrument (IDD), aussi appel?? le bras de rover, d??tient le suivant:
- Spectrom??tre M??ssbauer (MB) MIMOS II, d??velopp?? par le Dr. Gostar Klingelh??fer ?? la Johannes Gutenberg University dans Mayence, Allemagne , est utilis?? pour close-up enqu??tes de la min??ralogie des roches contenant du fer et des sols.
- Alpha Particle X-Ray Spectrometer ( APXS), d??velopp??s par la Institut Max Planck de chimie en Mayence, Allemagne , est utilis?? pour l'analyse close-up des abondances des ??l??ments qui composent les roches et les sols.
- Aimants, pour collecter les particules de poussi??re magn??tiques, d??velopp?? par Le groupe de Jens Martin Knudsen au Niels Bohr Institute, Copenhague . Les particules sont analys??s par le spectrom??tre M??ssbauer et Spectrom??tre ?? rayons X pour aider ?? d??terminer le rapport des particules magn??tiques ?? des particules non-magn??tiques et la composition de min??raux magn??tiques dans les roches et la poussi??re en suspension qui ont ??t?? broy??s par l'outil d'abrasion Rock. Il ya ??galement des aimants sur le devant de la rover, qui sont beaucoup ??tudi?? par le spectrom??tre M??ssbauer.
- Imager microscopique (MI) pour obtenir close-up, des images haute r??solution des roches et des sols. Le d??veloppement a ??t?? men?? par l'??quipe de Ken Herkenhoff au USGS Programme de recherche Astrogeology.
- Abrasion de pierres Tool (RAT), d??velopp?? par Honeybee Robotics, pour enlever les surfaces poussi??reuses et alt??r??s rock et exposer la mati??re fra??che pour examen par les instruments de bord.
Le bras robotique est en mesure de placer des instruments directement contre des cibles de roche et de sol d'int??r??t.
D??signation des Spirit et Opportunity
Les rovers Spirit et Opportunity ont ??t?? nomm??s par un concours de dissertation ??tudiante. Le gagnant ??tait par Sofi Collis, troisi??me ann??e ??tudiant russo-am??ricain de l'Arizona.
Je avais l'habitude de vivre dans un orphelinat. Il faisait sombre et froid et solitaire. La nuit, je levai les yeux vers le ciel brillant et je me sentais mieux. Je ai r??v?? que je pourrais y voler. En Am??rique, je peux faire tous mes r??ves. Merci pour le ??Esprit?? et ??Opportunity??.
- Sofi Collis, 9 ans
Avant cela, pendant le d??veloppement et le renforcement des rovers, ils ??taient connus comme MER-1 (Opportunity) et MER-2 (Esprit). En interne NASA utilise ??galement la mission d??signations MER-A (Esprit) et MER-B (Opportunity) sur la base de l'ordre de l'atterrissage sur Mars (Esprit d'abord, puis des chances).
SAP
L'??quipe de la NASA utilise une application logicielle appel??e SAP pour afficher les images recueillies ?? partir du mobile, et de planifier ses activit??s quotidiennes. Il existe une version disponible au public appel?? Maestro.