Radar
Sabías ...
Los artículos de esta selección escuelas se han organizado por tema currículo gracias a voluntarios SOS. El patrocinio de los niños ayuda a los niños en el mundo en desarrollo para aprender también.

El radar es un sistema que utiliza electromagnéticas olas para identificar la gama, la altitud, la dirección o velocidad de ambos móviles y fijos objetos como aviones , barcos, vehículos motorizados, formaciones meteorológicas y el terreno. El término fue acuñado RADAR en 1941 como una acrónimo de Ra dio D etección un anging nd R. El término ha entrado desde el idioma Inglés como una palabra estándar, radar, perdiendo la capitalización. Radar fue originalmente llamado RDF (Radio Buscador de Dirección) en el Reino Unido.
Un sistema de radar tiene un transmisor que emite cualquiera ondas de radio o (más habitualmente en estos días) microondas que se reflejan en el objetivo y detectada por un receptor, típicamente en la misma ubicación que el transmisor. Aunque la señal de retorno es generalmente muy débil, la señal puede ser amplificada. Esto permite que el radar para detectar objetos a distancias donde otras emisiones, como el sonido o la luz visible , sería demasiado débil para detectar. Radar se usa en muchos contextos, incluyendo meteorológica detección de precipitación, medición de las ondas superficiales del océano, control del tráfico aéreo, la policía detección de exceso de velocidad tráfico, y por los militares.
Historia
Varios inventores, científicos, y ingenieros contribuyeron a la desarrollo de radar. El primero en utilizar las ondas de radio para detectar "la presencia de objetos metálicos lejanos" era cristiana Hülsmeyer, quien en 1904 demostró la viabilidad de detectar la presencia de un barco en la niebla densa, pero no su distancia. Recibió Reichspatent Nr. 165.546 por su dispositivo de pre-radar en abril de 1904, y más tarde la patente 169.154 de una enmienda relacionada para usos. También recibió una patente en Inglaterra por su telemobiloscope en 22 de septiembre de 1904 .
Nikola Tesla, en agosto de 1917, estableció por primera vez los principios relativos a la frecuencia y nivel de potencia para las primeras unidades de radar primitivos. Él declaró: "[...] por su [de pie ondas electromagnéticas] utilizamos podemos producir a voluntad, desde una estación de envío, un efecto eléctrico en ninguna región del globo; [con lo que] es posible determinar la posición relativa o curso de un objeto en movimiento, tal como un buque en el mar, la distancia recorrida por el mismo, o su velocidad ".
Antes de la Segunda Guerra Mundial , la evolución de los estadounidenses (Dr. Robert M. Página probaron la primera radar monopulso en 1934), los alemanes, los franceses (patente francesa n ° 788.795 en 1934) y sobre todo los británicos quienes fueron los primeros en aprovechar plenamente como una defensa contra el ataque de aviones (GB593017 patente británica por Robert Watson-Watt en 1935) llevó a los primeros radares reales. Húngaro Zoltán Bay produjo un modelo de trabajo para 1936 en el Laboratorio Tungsram en la misma línea.
En 1934, Émile Girardeau, trabajando con los primeros sistemas de radares franceses, declaró que estaba construyendo sistemas de radar "concebidos de acuerdo con los principios establecidos por Tesla".
La guerra precipitó la investigación para encontrar una mejor resolución, más portabilidad y más características de la nueva tecnología de defensa. Años de la posguerra han visto el uso del radar en campos tan diversos como control de tráfico aéreo, monitoreo del clima, astrometría y control de la velocidad en carretera.
Principios
Reflexión

Las ondas electromagnéticas reflejan (dispersión) de cualquier gran cambio en la dieléctrico o constantes diamagnéticos. Esto significa que un objeto sólido en el aire o una vacío, o cualquier otro cambio significativo en la densidad atómica entre el objeto y lo que lo rodea, por lo general dispersar radar (radio) olas. Esto es particularmente cierto para las materiales eléctricamente conductores, tales como el metal y fibra de carbono, la toma de radar particularmente bien adaptado a la detección de aeronaves y buques. Radar material absorbente, que contiene resistiva y, a veces magnéticos sustancias, se usa en vehículos militares para reducir la reflexión de radar. Esto es el equivalente de radio de pintar algo de color oscuro.
Las ondas de radar se dispersan en una variedad de formas, dependiendo del tamaño (longitud de onda) de la onda de radio y la forma del objetivo. Si la longitud de onda es mucho más corto que el tamaño del objetivo, la onda rebotar en una manera similar a la forma en que la luz es reflejada por una espejo. Si la longitud de onda es mucho más largo que el tamaño de la diana, el objetivo es polarizado (cargas positivas y negativas se separan), como un antena dipolo. Esto se describe por Dispersión de Rayleigh, un efecto que crea el cielo azul de la Tierra y rojo puestas de sol. Cuando las dos escalas de longitud son comparables, puede haber resonancias. Los primeros radares utilizan muy largo longitudes de onda que eran más grandes que las metas y recibieron una señal vaga, mientras que algunos sistemas modernos utilizan más corto longitudes de onda (unos pocos centímetros o más corto) que pueden tomar imágenes de objetos tan pequeños como una barra de pan.
Ondas de radio de corto reflejan a partir de curvas y esquinas, de una manera similar a glint partir de una pieza redondeada de vidrio. Los objetivos más reflectantes para longitudes de onda cortas tienen ángulos de 90 ° entre la superficies reflectantes. Una estructura que consta de tres superficies planas reunidos en una sola esquina, al igual que la esquina en una caja, siempre reflejará olas que entran en su apertura directamente de vuelta a la fuente. Estos así llamados reflectores de esquina se utilizan comúnmente como reflectores de radar para hacer de otro modo difíciles de detectar objetos más fáciles de detectar, ya menudo se encuentran en los barcos con el fin de mejorar su detección en una situación de rescate y para reducir las colisiones. Por razones similares, los objetos de intentar evitar la detección serán ángulo de sus superficies en una forma de eliminar las esquinas interiores y evitar las superficies y los bordes perpendiculares a las direcciones de detección de probables, lo que conduce a la "extraña" en busca aviones stealth. Estas precauciones no eliminan por completo debido a la reflexión de difracción, especialmente en longitudes de onda más largas. La mitad de longitud de onda alambres o tiras de material conductor largos, tales como paja, son muy reflexivo, pero no remitan la energía dispersada de vuelta hacia la fuente. La medida en que un objeto refleja o dispersa las ondas de radio se llama su la sección transversal radar.
Ecuación Radar
La cantidad de potencia P r regresar a la antena de recepción está dada por la ecuación del radar:
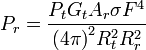
donde
- P t = potencia del transmisor
- G t = ganancia de la antena transmisora
- A r = apertura efectiva (área) de la antena receptora
- σ = la sección transversal radar, o coeficiente de dispersión, del objetivo
- F = factor de propagación patrón
- R t = distancia desde el transmisor a la diana
- R r = distancia desde el objetivo hasta el receptor.
En el caso común donde el transmisor y el receptor están en la misma ubicación, R t = R r y el término R t ² R r ² puede ser sustituido por R 4, donde R es el rango. Este rendimientos:
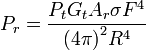
Esto muestra que la potencia recibida disminuye a medida que la cuarta potencia de la gama, lo que significa que la potencia reflejada de objetivos distantes es muy, muy pequeño.
La ecuación anterior con F = 1 es una simplificación para vacío y sin interferencias. El factor de propagación de los efectos de la multitrayecto y sombreado y depende de los detalles del medio ambiente. En una situación del mundo real, efectos de pérdida de propagación también deben ser considerados.
Otros desarrollos matemáticos en el procesamiento de señales de radar incluyen análisis de tiempo-frecuencia ( Weyl Heisenberg o wavelet), así como la chirplet transformar lo que hace uso del hecho de que los retornos de radar de objetivos en movimiento típicamente "chirrido" (cambian su frecuencia en función del tiempo, al igual que el sonido de un pájaro o murciélago).
Polarización
En la señal de radar transmitido, el campo eléctrico es perpendicular a la dirección de propagación, y esta dirección del campo eléctrico es el polarización de la onda. Radares utilizan horizontal, vertical, lineal y polarización circular para detectar diferentes tipos de reflexiones. Por ejemplo, polarización circular se utiliza para minimizar la interferencia causada por la lluvia. Vuelve polarización lineal suelen indicar las superficies metálicas. Retornos de polarización azar indican generalmente un fractal de la superficie, tales como rocas o el suelo, y son utilizados por radares de navegación.
Interferencia
Los sistemas de radar deben superar varias fuentes diferentes de señales no deseadas con el fin de centrarse sólo en los objetivos reales de interés. Estas señales no deseadas pueden provenir de fuentes internas y externas, tanto pasivas como activas. La capacidad del sistema de radar para superar estas señales no deseadas define su la relación señal a ruido (SNR). SNR se define como la relación de una potencia de la señal a la potencia de ruido dentro de la señal deseada.
En términos menos técnicos, relación señal a ruido (SNR), compara el nivel de una señal deseada (tal como dianas) para el nivel de ruido de fondo. Cuanto mayor SNR de un sistema, mejor es el aislamiento de los objetivos reales de las señales de ruido de los alrededores.
Ruido
Ruido de la señal es una fuente interna de variaciones aleatorias en la señal, que se genera inherentemente en cierto grado por todos los componentes electrónicos. El ruido suele aparecer variaciones aleatorias superpuestas a la señal de eco deseado recibido en el receptor del radar. Cuanto menor es la potencia de la señal deseada, más difícil es discernir lo del ruido (similar a tratar de escuchar un susurro mientras está de pie cerca de una carretera muy transitada). Por lo tanto, las fuentes de ruido más importantes aparecen en el receptor y se hace mucho esfuerzo por minimizar estos factores. Figura de ruido es una medida del ruido producido por un receptor en comparación con un receptor ideal, y esto debe ser minimizado.
El ruido también es generado por fuentes externas, lo más importante la radiación térmica natural de la escena de fondo que rodea a la diana de interés. En los sistemas de radar modernos, debido a las altas prestaciones de sus receptores, el ruido interno es típicamente de aproximadamente igual o menor que el ruido de escena externa. Una excepción es si el radar está dirigido hacia arriba en el cielo claro, donde la escena es tan frío que genera muy poco ruido térmico.
Habrá también Parpadear ruido debido a los electrones de tránsito, pero dependiendo de 1 / f, será mucho menor que el ruido térmico cuando la frecuencia es alta. Por lo tanto, en radar de impulsos, el sistema será siempre heterodino. Ver frecuencia intermedia.
Desorden
El desorden se refiere a la frecuencia de radio real (RF) ecos devueltos de los objetivos que son, por definición, poco interesante para los operadores de radar en general. Estos objetivos incluyen principalmente los objetos naturales como tierra, mar, precipitación (como lluvia, nieve o granizo), las tormentas de arena, animales (especialmente aves), atmosférico turbulencia, y otros efectos atmosféricos, tales como reflexiones y la ionosfera de meteoros senderos. El desorden también puede ser devuelto a partir de objetos hechos por el hombre, tales como edificios y, de forma deliberada, por las contramedidas de radar como paja.
Algunos desorden también puede ser causada por una larga radar la guía de ondas entre el transceptor de radar y la antena. En un típico indicador de posición del plan (PPI) de radar con una antena giratoria, lo cual suele ser visto como un "sol" o "rayos de sol" en el centro de la pantalla como el receptor responde a ecos de partículas de polvo y RF equivocada en la guía de onda. Ajuste de la temporización entre el momento en el transmisor envía un pulso y cuando la etapa de receptor está habilitado generalmente reducirá la sunburst sin afectar la precisión de la gama, ya que la mayoría sunburst es causada por un impulso de transmisión difusa reflejada antes de salir de la antena.
Si bien algunas fuentes desorden pueden ser indeseable para algunas aplicaciones de radar (como las nubes de tormenta para los radares de defensa aérea), que pueden ser deseables para otros ( meteorológicos radares en este ejemplo). El desorden se considera una fuente de interferencia pasiva, ya que sólo aparece en respuesta a las señales de radar enviados por el radar.
Hay varios métodos para detectar y neutralizar el desorden. Muchos de estos métodos se basan en el hecho de que el desorden tiende a aparecer estática entre exploraciones de radar. Por lo tanto, al comparar las exploraciones posteriores ecos, aparecerán objetivos deseables para moverse y todos los ecos estacionarios pueden ser eliminados. La perturbación, se puede reducir mediante el uso de la polarización horizontal, mientras que la lluvia se reduce con polarización circular (tenga en cuenta que los radares meteorológicos desean para el efecto contrario, por lo tanto, el uso de Polarización Lineal el mejor para detectar la precipitación). Otros métodos intentan aumentar la relación señal-desorden.
CFAR (Constante Tasa de falsas alarmas, una forma de Control automático de ganancia o AGC) es un método basándose en el hecho de que el desorden vuelve mucho más numerosos que los ecos de blancos de interés. La ganancia del receptor se ajusta automáticamente para mantener un nivel constante de desorden visible en general. Mientras que esto no ayuda a detectar objetivos enmascarados por fuerte desorden circundante, sí ayuda a distinguir fuertes fuentes de destino. En el pasado, radar AGC se controla electrónicamente y afectó a la ganancia de todo el receptor de radar. Como radares evolucionaron, AGC convirtió ordenador software controlado, y afectó la ganancia con mayor granularidad, en las células de detección específicos.

El desorden también pueden proceder de trayectos múltiples ecos de objetivos válidos debido a la reflexión de tierra, conductos atmosférica o reflexión ionosférica / refracción. Este tipo desorden específico es especialmente molesto, ya que parece moverse y comportarse como los demás (puntuales) objetivos normales de interés, lo que crea un fantasma. En un escenario típico, un eco multitrayectoria aeronave es reflejada desde el suelo a continuación, apareciendo al receptor como un objetivo idéntico a continuación la correcta. El radar puede tratar de unificar los objetivos, informar de la diana a una altura incorrecta, o - peor - eliminarlo sobre la base de jitter o una imposibilidad física. Estos problemas pueden ser superados mediante la incorporación de un mapa de tierra de los alrededores del radar y la eliminación de todos los ecos que parecen originarse por debajo del suelo o por encima de una cierta altura. En reciente ATC se utilizan algoritmos de equipos de radar para identificar los objetivos falsos comparando los actuales rendimientos de pulso, a aquellos, así como el cálculo de improbabilidades retorno adyacentes debido a la altura calculada, la distancia y el tiempo de radar.
Jamming
Jamming radar se refiere a señales de radiofrecuencia procedentes de fuentes externas al radar, transmitiendo en la frecuencia del radar y por lo tanto enmascarar objetivos de interés. Jamming puede ser intencional, como con un guerra electrónica (EW) táctica, o no, al igual que con las fuerzas amigas de operar el equipo que transmite con el mismo rango de frecuencia. Jamming se considera una fuente de interferencia activa, ya que es iniciada por los elementos externos del radar y en general no relacionada con las señales de radar.
Jamming es problemático radar desde la señal de interferencia solamente tiene que viajar de una vía (de la emisión al receptor radar) mientras que los ecos de radar de desplazamiento de dos maneras (radar-target-radar) y por lo tanto se reducen significativamente en el poder por el momento vuelven al receptor de radar. Jammers por lo tanto pueden ser mucho menos potente que sus radares atascado y todavía enmascarar con eficacia los objetivos a lo largo del línea de visión desde el jammer al radar (lóbulo principal Jamming). Inhibidores tienen un efecto añadido de que afecta a los radares a lo largo de otra línea de lugares de interés, debido a la radar receptor de lóbulos laterales (lóbulos laterales Jamming).
Jamming lóbulo principal sólo puede generalmente ser reducido por el estrechamiento del lóbulo principal ángulo sólido, y nunca puede ser eliminada por completo cuando se enfrenta directamente un jammer que utiliza la misma frecuencia y polarización como el radar. Jamming de lóbulo lateral puede ser superado mediante la reducción de los lóbulos laterales que reciben en el diseño de la antena de radar y mediante el uso de una antena omnidireccional para detectar y caso omiso de las señales no lóbulo principal. Otras técnicas anti-jamming son salto de frecuencia y polarización. Ver Contra-contramedidas electrónicas para obtener más detalles.
La interferencia se ha convertido recientemente en un problema para Banda C (5,66 GHz) radares meteorológicos con la proliferación de 5.4 GHz banda WiFi equipo.
Procesamiento de señales de radar
Medición de la distancia
Tiempo de transito

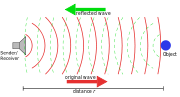
Una manera de medir la distancia a un objeto es transmitir un pulso corto de la señal de radio (radiación electromagnética), y medir el tiempo que toma para que el reflejo para volver. La distancia es la mitad del producto del tiempo de ida y vuelta (porque la señal tiene que viajar a la meta y luego de vuelta al receptor) y la velocidad de la señal. Dado que las ondas de radio viajan a la velocidad de la luz (186.000 millas por segundo o 300 millones de metros por segundo), medición de la distancia exacta requiere la electrónica de alto rendimiento.
En la mayoría de los casos, el receptor no detecta el retorno mientras se está transmitiendo la señal. Mediante el uso de un dispositivo llamado un duplexor, el radar cambia entre transmisión y recepción a una velocidad predeterminada. La distancia mínima se calcula mediante la medición de la longitud del pulso multiplicado por la velocidad de la luz, dividida por dos. Con el fin de detectar blancos más cercanos uno debe utilizar una longitud de pulso más corto.
Un efecto similar impone un alcance máximo también. Si el retorno de la meta viene cuando se está enviando el siguiente impulso, una vez más, el receptor no puede decir la diferencia. Con el fin de maximizar el alcance, uno quiere usar tiempos más largos entre pulsos, o comúnmente conocido como un tiempo de repetición de impulsos (PRT).
Estos dos efectos tienden a estar en conflicto entre sí, y no es fácil de combinar tanto el bien de corto alcance y una buena variedad de largo en un solo radar. Esto se debe a que los pulsos cortos necesarios para un buen rango mínimo de difusión tienen menos energía total, por lo los rendimientos mucho menores y el objetivo más difícil de detectar. Esto podría ser compensado mediante el uso de más impulsos, pero esto podría acortar la distancia máxima de nuevo. Así cada radar utiliza un tipo particular de señal. Radares de largo alcance tienden a usar pulsos largos con largas demoras entre ellos, y los radares de corto alcance utilizan pulsos más pequeños con menos tiempo entre ellos. Este patrón de impulsos y pausas se conoce como el frecuencia de repetición de impulsos (o PRF), y es una de las principales formas de caracterizar un radar. Como la electrónica han mejorado muchos radares ahora pueden cambiar su PRF cambiando así su gama. Los más nuevos radares en realidad disparan 2 pulsos durante una celda, uno de corto alcance (~ 6 millas) y una señal separada para distancias más largas (~ 60 millas).
La distancia resolución y las características de la señal recibida en comparación con el ruido depende en gran medida de la forma del pulso. El pulso es a menudo modulada para lograr un mejor rendimiento gracias a una técnica conocida como compresión de impulsos.
La distancia también se puede medir como una función del tiempo. El Radar Milla es la cantidad de tiempo que tarda un pulso de radar de viajar una milla náutica, reflejan en un objetivo, y volver a la antena del radar. Desde una milla náutica se define como exactamente 1.852 metros, luego dividiendo esta distancia por la velocidad de la luz (exactamente 299.792.458 metros por segundo), y multiplicando el resultado por 2 (ida y vuelta = doble de la distancia), se obtiene un resultado de aproximadamente 12,36 microsegundos de duración.
La modulación de frecuencia
Otra forma de medir la distancia del radar se basa en modulación de frecuencia. Comparación de frecuencias entre dos señales es considerablemente más preciso, incluso con la electrónica de edad avanzada, que temporización de la señal. Al cambiar la frecuencia de la señal de retorno y la comparación de que con el original, la diferencia se puede medir fácilmente.
Esta técnica se puede utilizar en radar de onda continua, y se encuentra a menudo en los aviones altímetros de radar. En estos sistemas una señal de radar "portador" se modula en frecuencia de una manera predecible, típicamente variando arriba y hacia abajo con una de onda sinusoidal o patrón de diente de sierra en las frecuencias de audio. La señal es entonces enviada desde una antena y recibida el otro, normalmente se encuentra en la parte inferior de la aeronave, y la señal se puede comparar de forma continua utilizando un modulador de frecuencia simple latido que produce un tono de frecuencia de audio de la señal de retorno y una parte de la señal transmitida.
Dado que la frecuencia de la señal está cambiando, por el tiempo que la señal vuelve a la aeronave de la emisión se ha desplazado a alguna otra frecuencia. La cantidad de ese cambio es mayor durante tiempos más largos, por lo que mayores diferencias de frecuencia significan una distancia más larga, la cantidad exacta es la "velocidad de la rampa" seleccionada por la electrónica. La cantidad de cambio está, por tanto, directamente relacionada con la distancia recorrida, y se puede mostrar en un instrumento. Este procesamiento de la señal es similar a la utilizada en la detección de la velocidad Radar Doppler. Sistemas de ejemplo que utilizan este enfoque son Azusa, MISTRAM, y UDOP.
Una ventaja adicional es que el radar puede funcionar eficazmente a frecuencias relativamente bajas, comparables a la utilizada por la televisión UHF. Esto era importante en el desarrollo temprano de este tipo cuando la alta generación de señales de frecuencia era difícil o costoso.
Medición de la velocidad
La velocidad es el cambio en la distancia a un objeto con respecto al tiempo. Así, el sistema existente para medir la distancia, combinado con una memoria de capacidad para ver dónde estaba la meta última, es suficiente para medir la velocidad. En un momento la memoria consistió en una toma de usuario marcas de grasa de lápiz en la pantalla del radar, y luego calcular la velocidad usando un regla de calculo. Sistemas de radar modernos realizan la operación equivalente más rápido y con precisión utilizando computadoras.
Sin embargo, si la salida del transmisor es coherente (fase sincronizada), hay otro efecto que puede ser utilizado para hacer las mediciones de velocidad casi instantánea (no se requiere memoria), conocido como el Efecto Doppler. La mayoría de los sistemas de radar modernos utilizan este principio en el pulso-doppler sistema de radar. Señales de retorno de los objetivos se desplazan lejos de esta frecuencia base a través del efecto Doppler que permite el cálculo de la velocidad del objeto con respecto al radar. El efecto Doppler sólo es capaz de determinar la velocidad relativa del objetivo a lo largo de la línea de visión desde el radar hasta el objetivo. Cualquier componente de la velocidad del blanco perpendicular a la línea de visión no se puede determinar utilizando el efecto Doppler solo, pero se puede determinar mediante el seguimiento del objetivo de acimut con el tiempo. Información adicional de la naturaleza de los rendimientos de Doppler se puede encontrar en el radar características de la señal artículo.
También es posible hacer un radar sin ninguna pulsación, conocido como radar de onda continua (CW radar), mediante el envío de una señal muy pura de una frecuencia conocida. Radar CW es ideal para determinar la componente radial de la velocidad de un objetivo, pero no puede determinar el rango del objetivo. Radar CW es utilizado habitualmente por la policía de tráfico para medir la velocidad del vehículo de forma rápida y precisa, donde gama no es importante.
Reducción de los efectos de interferencia
El procesamiento de señales se emplea en los sistemas de radar para reducir los efectos de interferencia de radar . Técnicas de procesamiento de señal incluyen mover indicación del objetivo (MTI), doppler de pulso, la detección de blancos en movimiento procesadores (MTD), correlación con radar secundario de vigilancia (SSR) objetivos, procesamiento adaptativo espacio-tiempo (STAP), y pista-antes-de detectar (TBD). Tasa constante de falsas alarmas (CFAR) y modelo digital del terreno de procesamiento (DTM) también se utilizan en entornos desorden.
Terreno Y Track Extracción
Vuelve vídeo Radar en los aviones pueden ser sometidos a un proceso de extracción parcela mediante el cual se descartan las señales espurias y de interferencia. Una secuencia de objetivos de rentabilidad se puede controlar a través de un dispositivo conocido como un extractor de parcela. Los rendimientos en tiempo real no gubernamentales pertinentes pueden ser retirados de la información que se muestra y una sola parcela mostrada. Una secuencia de parcelas puede ser monitoreado y una 'pista' formado, facilitando así la identificación de un objetivo aviones genuino a través de ecos de radar pertinentes no deseados y no gubernamentales.
Ingeniería Radar
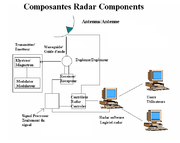
Un radar tiene diferentes componentes:
- La transmisor que genera la señal de radio con un oscilador tal como una klystron o una magnetrón y controla su duración por una modulador.
- La guía de onda que une el transmisor y la antena.
- La duplexor que sirve como un interruptor entre la antena y el transmisor o el receptor de la señal cuando se utiliza la antena en ambas situaciones.
- La receptor. Conociendo la forma de la señal recibida deseada (a pulso), un receptor óptimo puede ser diseñado utilizando una filtro adaptado.
- Una sección electrónica que controla todos esos dispositivos y la antena para realizar el barrido del radar ordenado por una software.
- Un enlace a los usuarios finales.
Diseño de la antena
Las señales de radio emitidas desde una sola antena se extenderá en todas direcciones, y del mismo modo una sola antena recibirán señales igualmente de todas las direcciones. Esto deja el radar con el problema de decidir dónde se encuentra el objeto de destino.
Los primeros sistemas tendían a utilizar antenas emisoras omnidireccionales, con antenas receptoras direccionales que se señalaron en varias direcciones. Por ejemplo, el primer sistema para ser desplegado, Cadena de inicio, utilizado dos antenas rectas en ángulo recto para la recepción, cada uno en una pantalla diferente. El máximo rendimiento se detectaría con una antena en ángulo recto con el objetivo, y un mínimo con la antena apuntando directamente en ella (a fin de). El operador puede determinar la dirección a un objetivo por la rotación de la antena para una pantalla mostró un máximo mientras que la otra muestra un mínimo.
Una seria limitación con este tipo de solución es que la transmisión se envía en todas las direcciones, por lo que la cantidad de energía en la dirección siendo examinado es una pequeña parte de la transmitida. Para obtener una cantidad razonable de poder en el "objetivo", la antena que transmite también debe ser direccional.
Reflector parabólico
Más sistemas modernos utilizan un dirigible "plato" parabólico para crear un haz de emisión apretado, típicamente usando el mismo plato como el receptor. Tales sistemas a menudo se combinan dos frecuencias de radar en la misma antena con el fin de permitir que la dirección automática, o el bloqueo de radar.
Los reflectores parabólicos pueden ser tanto parábolas simétricas o parábolas malcriados:
- Antenas parabólicas simétricos producir un haz estrecho "lápiz" tanto en las dimensiones X e Y y en consecuencia, tienen una mayor ganancia. La NEXRAD Pulse-Doppler radar meteorológico utiliza una antena simétrica para realizar exploraciones volumétricas detalladas del atmostphere.
- Antenas parabólicas estropeados producen un haz estrecho en una dimensión y una relativamente amplia de haz en el otro. Esta característica es útil si la detección de blancos en un amplio intervalo de ángulos es más importante que la ubicación de destino en tres dimensiones. La mayoría de los radares de vigilancia 2D usan una antena parabólica en mal estado con un ancho de haz azimutal estrecho y ancho de haz vertical de ancho. Esta configuración del haz permite que el operador de radar para detectar una aeronave en un azimut específico, sino a una altura indeterminada. Por el contrario, los llamados radares altura encontrar "Nodder" utilizan un plato con un ancho de haz vertical, estrecha y amplia anchura de haz azimutal para detectar un avión a una altura específica pero con poca precisión azimutal.
Tipos de exploración
- Scan Primaria: Una técnica de exploración donde se mueve la antena principal aérea para producir un haz de exploración, los ejemplos incluyen exploración circular, sector escanear etc
- Scan secundario: Una técnica de exploración donde se mueve el alimentador de antena para producir un haz de exploración, ejemplo incluyen exploración cónica, de exploración sector unidireccional, la conmutación de lóbulo etc.
- Palmer Scan: Una técnica de exploración que produce un haz de exploración moviendo la antena principal y de su alimentación. Un Scan Palmer es una combinación de una exploración primaria y una exploración secundaria.

Guía de onda ranurada
Aplicarse de manera similar a la reflector parabólico la guía de ondas ranurada se mueve mecánicamente para escanear y es particularmente adecuado para sistemas de escaneo de superficie no de seguimiento, en el que el patrón vertical puede permanecer constante. Debido al menor costo y menor exposición al viento, a bordo, la superficie del aeropuerto, y radares de vigilancia del puerto ahora usar este en lugar de la antena parabólica.
Phased array
Otro método de dirección se utiliza en un radar de disposición en fase. Este utiliza una array de antenas similares espaciados de forma apropiada, la fase de la señal a cada antena individual ser controlada para que la señal se refuerza en la dirección deseada y cancela en otras direcciones. Si las antenas individuales están en un plano y la señal se alimenta a cada antena en fase con todos los otros, entonces la señal se refuerzan en una dirección perpendicular a dicho plano. Al alterar la fase relativa de la señal alimentada a cada antena la dirección del haz se puede mover porque la dirección de la interferencia constructiva se moverá. Debido a que los radares de elementos en fase no requieren física movimiento del haz puede escanear a miles de grados por segundo, lo suficientemente rápido como para irradiar y rastrear muchas de las metas individuales, y aún así ejecutar periódicamente una búsqueda de gran alcance. Por simplemente girando algunas de las antenas de encendido o apagado, el haz se puede propagar para la búsqueda, se redujo para el seguimiento, o incluso divide en dos o más radares virtuales. Sin embargo, el rayo no puede ser efectivamente dirigido a pequeños ángulos con respecto al plano de la matriz, por lo que se requieren para la cobertura total múltiples arreglos, por lo general dispuestos en las caras de una pirámide triangular (ver foto).
Radares Phased Array han estado en uso desde los primeros años de uso de radares en la Segunda Guerra Mundial , pero las limitaciones de la electrónica provocado bastante pobre precisión. Radares phased array se utilizaron originalmente para misil defensa. Ellos son el corazón de la nave-Borne Sistema de combate Aegis, y la Sistema de misiles Patriot, y se utilizan cada vez más en otras áreas debido a la falta de piezas móviles las hace más fiable, ya veces permite una efectiva de la antena mucho más grande, útil en aplicaciones de aviones de combate que sólo ofrecen confinados espacio para exploración mecánica.
Como el precio de la electrónica ha caído, radares phased array se han vuelto más y más común. Casi todos los sistemas de radar militares modernas están basadas en arreglos de fase, donde el pequeño costo adicional es de gran compensado por la mejora de la fiabilidad de un sistema sin partes móviles. Los diseños tradicionales de movimiento-antena están siendo ampliamente utilizados en papeles donde el costo es un factor importante como la vigilancia del tráfico aéreo, radares meteorológicos y sistemas similares.
Radares phased array también se valoran para su uso en aeronaves, ya que pueden realizar un seguimiento de múltiples objetivos. El primero de aeronaves a utilizar un radar phased array es el B-1B Lancer. El primer avión de combate de aeronaves a utilizar el radar de elementos en fase fue la Mikoyan MiG-31. Del MiG-31M SBI-16 Zaslon radar phased array es considerado como el radar de combate más potente del mundo . Phased-array interferometría o, Síntesis de Apertura técnicas, utilizando una gran variedad de platos separados que están eliminando gradualmente en una sola abertura efectiva, no se utilizan normalmente para aplicaciones de radar, a pesar de que son ampliamente utilizados en radioastronomía. Debido a la Maldición matriz adelgazada, tales matrices de múltiples aberturas, cuando se utiliza en transmisores, resulta en haces estrechos, a expensas de la reducción de la potencia total transmitida a la diana. En principio, tales técnicas utilizadas podrían aumentar la resolución espacial, pero la energía más baja significa que esto generalmente no es eficaz. Síntesis de la abertura por el post-tratamiento de los datos de movimiento a partir de una única fuente en movimiento, por otro lado, se utiliza ampliamente en el espacio y los sistemas de radar aerotransportados (ver Radar de apertura sintética).
Bandas de frecuencias
Los nombres de las bandas tradicionales se originaron como nombres en código durante la Segunda Guerra Mundial y todavía están en uso militar y la aviación en todo el mundo en el siglo 21. Se han adoptado en los Estados Unidos por la IEEE, e internacionalmente por la UIT. La mayoría de los países tienen regulaciones adicionales para controlar que están disponibles para uso civil o militar partes de cada banda.
Otros usuarios del espectro radioeléctrico, como los de radiodifusión y contramedidas electrónicas ( ECM) industrias, han sustituido a las designaciones militares tradicionales con sus propios sistemas.
| Nombre de Banda | Rango De Frecuencia | Rango de longitud de onda | Notas |
|---|---|---|---|
| HF | 3-30 MHz | 10-100 m | sistemas de radar costeras, más allá del horizonte de radar (OTH) radares; 'Alta frecuencia' |
| P | <300 MHz | 1 m + | 'P' de 'anterior', aplicado de forma retroactiva a principios de los sistemas de radar |
| VHF | 50-330 MHz | 0,9-6 m | gama muy larga, de penetración terrestre; 'Muy alta frecuencia' |
| UHF | 300-1000 MHz | 0,3-1 m | muy largo alcance (por ejemplo, de misiles balísticos de alerta temprana), penetración en el terreno, follaje penetrante; 'Ultra alta frecuencia' |
| L | 1-2 GHz | 15-30cm | de largo alcance de control del tráfico aéreo y la vigilancia; 'L' de 'long' |
| S | 2.4 GHz | 7,5 a 15 cm | terminal de control de tráfico aéreo, tiempo de largo alcance, radar marino; 'S' de 'corto' |
| C | 8.4 GHz | 3,75 a 7,5 cm | Transpondedores de satélite; un compromiso (de ahí 'C') entre bandas X y S; tiempo |
| X | 8.12 GHz | 2,5 a 3,75 cm | guía de misiles, radares marinos, el clima, la cartografía de resolución media y vigilancia terrestre; en EE.UU. el estrecho rango de 10.525 GHz ± 25 MHz se utiliza para el radar del aeropuerto. Nombrado banda X porque la frecuencia era un secreto durante WW2. |
| Ku | 12-18 GHz | 1,67 a 2,5 cm | cartografía de alta resolución, la altimetría por satélite; frecuencia de poco menos de la banda K (de ahí 'u') |
| K | 18-27 GHz | 1,11 a 1,67 cm | de alemana Kurz , que significa "corto"; uso limitado debido a la absorción por vapor de agua , por lo que K u y K la se utiliza en lugar de la vigilancia. K-banda se utiliza para la detección de nubes por los meteorólogos, y por la policía para detectar conductores por exceso de velocidad. Pistolas de radar de banda K operan a 24.150 ± 0.100 GHz. |
| Kla | 27-40 GHz | 0,75 a 1,11 cm | mapeo, de corto alcance, vigilancia aeroportuaria; justo por encima de la frecuencia de banda K (de ahí 'a') el radar de fotos, que se utiliza para activar las cámaras que toman fotografías de las matrículas de los coches que funcionan las luces rojas, funciona a 34.300 ± 0.100 GHz. |
| mm | 40-300 GHz | 7,5 mm - 1 mm | banda milimétrica, subdividida de la siguiente manera. Los rangos de frecuencia dependen del tamaño de guía de ondas. Cartas Múltiples son asignados a estas bandas por los diferentes grupos. Estos son de Baytron, una empresa ya desaparecida que hizo el equipo de prueba. |
| Q | 40-60 GHz | 7,5 mm - 5 mm | Se utiliza para la comunicación militar. |
| V | 50-75 GHz | 6,0-4 mm | Muy fuertemente absorbida por la atmósfera. |
| E | 60-90 GHz | 6,0 a 3,33 mm | |
| W | 75-110 GHz | 2,7-4,0 mm | utilizado como un sensor visual para vehículos experimentales autónomas, la observación meteorológica de alta resolución y de imágenes. |
Moduladores de radar
Los moduladores, también llamados formando redes o líneas (PFN) de impulsos actúan para proporcionar los cortos pulsos de energía al magnetrón. Esta tecnología se conoce como potencia emitida en impulsos. De esta manera, el pulso transmitido de la radiación de RF se mantiene a una, y por lo general, muy corta duración definida. Moduladores constan de un generador de impulsos de alta tensión formado a partir de un suministro de HV, y un alto voltaje del conmutador, tal como un thyratron.
La klystron tubo también puede usarse como un modulador, ya que es un amplificador, por lo que puede ser modulada por su señal de baja potencia de entrada.
Refrigerante Radar
CoolanolyPAO (olefina poli-alfa) son los dos principales refrigerantes utilizados para enfriar los equipos de radar aerotransportado hoy.
La Marina de los EE.UU. ha instituido un programa denominado Prevención de la Contaminación (P2) para reducir o eliminar el volumen y la toxicidad de los residuos, emisiones a la atmósfera, y las descargas de efluentes. Debido a esto Coolanol se usa con menos frecuencia en la actualidad.
PAO es una composición lubricante sintético es una mezcla de un poliol éster mezclado con cantidades eficaces de un antioxidante , chupete metal amarillo y inhibidores de la herrumbre. La mezcla de ésteres de poliol incluye una proporción importante de poli (poliol de neopentilo) mezcla de éster formado mediante la reacción de poli ( pentaeritritol) ésteres parciales con al menos un C7 a C12 de ácido carboxílico mezclado con un éster formado por la reacción de un poliol que tiene al menos dos grupos hidroxilo y al menos un ácido carboxílico C8-C10. Preferiblemente, los ácidos son lineales y evitar aquellos que pueden causar olores durante el uso. Aditivos eficaces incluyen antioxidantes secundarios arilamina, triazol derivado chupete metal amarillo y un aminoácido derivado y sustituido primaria y secundaria amina y / o antioxidante diamina.
Una composición de refrigerante / lubricante sintético, que comprende una mezcla de éster de 50 a 80 por ciento en peso de poli (poliol de neopentilo) éster formado por la reacción de un poli (poliol de neopentilo) éster parcial y al menos un ácido monocarboxílico lineal que tiene de 6 a 12 átomos de carbono, y de 20 a 50 por ciento en peso de un éster de poliol formado por reacción de un poliol que tiene de 5 a 8 átomos de carbono y al menos dos grupos hidroxilo con al menos un ácido monocarboxílico lineal que tiene de 7 a 12 átomos de carbono, los porcentajes en peso basado en el peso total de la composición.
Funciones de radar y roles

Detección y radares de búsqueda
- Alerta Temprana (EW) Sistemas de Radar
- Temprano Radar Warning
- Ground Control Intercepción (GCI) Radar
- Airborne Early Warning (AEW)
- Over-the-Horizon (OTH) Radar
- Blanco de adquisición (TA) Sistemas de Radar
- Superficie-a-aire de misiles (SAM) Sistemas
- Artillería Antiaérea (AAA) Sistemas
- Superficie de la búsqueda (SS) Sistemas de Radar
- Superficie Búsqueda Radar
- Vigilancia Costera Radar
- Puerto de Vigilancia Radar
- Antisubmarina guerra (ASW) Radar
- Altura Finder (HF) Sistemas de Radar
- Sistemas de Radar Gap Filler
Radares de amenazas
- Tracking Target (TT) Sistemas
- Sistemas AAA
- Sistemas SAM
- Aproximación de Precisión Radar (PAR) Sistemas
- Sistemas Multi-Function
- Control de Incendios (FC) Sistemas
- Modo de adquisición
- Modo de seguimiento semiautomática
- Modo Seguimiento manual
- Intercepción Aérea (AI) Radares
- Modo de búsqueda
- Modo TA
- Modo TT
- Objetivo Iluminación (TI) Modo
- Misiles Orientación (MG) Modo
- Control de Incendios (FC) Sistemas
Sistemas de guía de misiles
- Aire-aire de misiles (AAM)
- Aire-superficie de Misiles (ASM)
- Sistemas SAM
- Misiles superficie-superficie (SSM) Sistemas
Battlefield y reconocimiento de radar

- Battlefield Sistemas de Vigilancia
- Los radares de vigilancia del campo de batalla
- Countermortar / Sistemas contrabatería
- Seguimiento Shell radares
- Sistemas de Cartografía Aérea
- Side Looking Airborne Radar (SLAR)
- Radar de Apertura Sintética (SAR)
- Perímetro de Vigilancia Radar (PSR)

- Sistemas de Control de Tráfico Aéreo
- Control de Tráfico Aéreo (ATC) Radares
- Radar secundario de vigilancia (SSR) (aeropuerto de Vigilancia Radar)
- Enfoque de control de tierra (GCA) Radares
- Aproximación de Precisión Radar (PAR) Sistemas
- Equipo de medición de distancia (DME)
- Radio Balizas
- Altímetro radar (RA) Sistemas
- (TGF) Sistemas de seguimiento del terreno Radar
Sistemas de radares espaciales y de instrumentación gama
- Espacio (SP) Sistemas de seguimiento
- Range Instrumentation (RI) Sistemas
- Vídeo Relay / Sistemas de enlace descendente
- Radar Espacio-Basado
Los sistemas de radar meteorológicos de detección
- Radar meteorológico
- Perfiladores de viento

Storm Frontreflectividades en una pantalla de radar del tiempo (NOAA)

Radar perfiles del viento


{kind=link}
Radares para la investigación biológica
- Radar de Aves
- Radar de insectos
- Radar de vigilancia (en su mayoría en banda X y S, es decir, primariaradares ATC)
- Seguimiento de radar (en su mayoría banda X, es decir,los sistemas de control de incendios)
A través de los sistemas de radar de pared
Los sistemas de radar que funcionan con la tecnología Ultra Wideband puede sentir un ser humano detrás de las paredes. Esto es posible ya que las características de reflexión de los seres humanos son generalmente mayores que los de los materiales típicos utilizados en la construcción. Sin embargo, desde que los humanos reflejan mucha menos energía de radar que lo hace de metal, estos sistemas requieren una tecnología sofisticada para aislar objetivos humanos y, además, para procesar cualquier tipo de imagen detallada.