Quantité de mouvement

Dans le jeu de billard, il est possible de considérer qu'il y a conservation de la quantité de mouvement du système constitué par les billes en collision. Ainsi, lors d'une collision d'une bille en mouvement sur une autre immobile, cette dernière va acquérir tout (si la bille incidente est stoppée nette) ou une partie (si elle continue ou est déviée) de la quantité de mouvement initiale de la bille incidente.
| Unités SI | kg.m.s-1 |
|---|---|
| Dimension | M.L.T-1 |
| Grandeur extensive | Oui |
| Grandeur conservative | Oui |
| Nature | vecteur (mécanique classique), quadrivecteur (relativité restreinte), opérateur (mécanique quantique) |
| Expressions |
 |
En physique, la quantité de mouvement est le produit de la masse par le vecteur vitesse d'un corps matériel supposé ponctuel. Il s'agit donc d'une grandeur vectorielle, définie par , qui dépend du référentiel d'étude[1]. Par additivité, il est possible de définir la quantité de mouvement d'un corps non ponctuel (ou système matériel), dont il est possible de démontrer qu'elle est égale à la quantité de mouvement de son centre d'inertie affecté de la masse totale du système, soit  (C étant le centre d'inertie)[1]. Son unité est le kg.m.s-1.
(C étant le centre d'inertie)[1]. Son unité est le kg.m.s-1.
La notion de quantité de mouvement s'introduit naturellement en dynamique : en fait la relation fondamentale de la dynamique exprime le fait que l'action d'une force extérieure sur un système conduit à une variation de sa quantité de mouvement :  . Par ailleurs elle fait partie, avec l'énergie, des grandeurs qui se conservent pour un système isolé, c'est-à-dire soumis à aucune action extérieure, ou si celles-ci sont négligeables ou se compensent. Cette propriété est utilisée notamment en théorie des collisions.
. Par ailleurs elle fait partie, avec l'énergie, des grandeurs qui se conservent pour un système isolé, c'est-à-dire soumis à aucune action extérieure, ou si celles-ci sont négligeables ou se compensent. Cette propriété est utilisée notamment en théorie des collisions.
En mécanique analytique ou quantique la quantité de mouvement apparaît naturellement comme la grandeur liée à l'invariance du hamiltonien ou du lagrangien dans une translation d'espace, c'est-à-dire à la propriété d'homogénéité de l'espace, qui est effectivement vérifiée en l'absence de forces ou champs extérieurs. Sur un plan plus général il s'agit en fait d'une des conséquences du théorème de Noether qui permet de relier symétrie continue d'un système et lois de conservation.
La notion d'impulsion ou moment linéaire généralise en mécanique analytique celle de quantité de mouvement, en tant que moment conjugué de la vitesse généralisée  , soit
, soit  . Quantité de mouvement et impulsion sont souvent confondues en raison de leur coïncidence dans la majorité des cas. Néanmoins ces deux grandeurs sont distinctes[2],[3].
. Quantité de mouvement et impulsion sont souvent confondues en raison de leur coïncidence dans la majorité des cas. Néanmoins ces deux grandeurs sont distinctes[2],[3].
L'impulsion coïncide avec la quantité de mouvement en coordonnées cartésiennes ou plus généralement si est la dérivée d'une variable linéaire, et non d'un angle[4] et en l'absence de champ magnétique. Dans le cas d'une particule chargée en mouvement dans un champ électromagnétique, impulsion et quantité de mouvement diffèrent en raison d'un terme en  dû au potentiel vecteur, q étant la charge de la particule. L'analogue « angulaire » du moment linéaire est le moment angulaire généralement confondu avec le moment cinétique.
dû au potentiel vecteur, q étant la charge de la particule. L'analogue « angulaire » du moment linéaire est le moment angulaire généralement confondu avec le moment cinétique.
En mécanique relativiste les notions de quantité de mouvement et d'énergie sont liées par l'introduction du quadrivecteur énergie-impulsion  , où
, où  est le facteur de Lorentz.
est le facteur de Lorentz.
Quantité de mouvement en mécanique classique
Définition en mécanique newtonienne
En mécanique classique, la quantité de mouvement d'un point matériel de masse  animé dans un référentiel donné d'une vitesse
animé dans un référentiel donné d'une vitesse  est définie comme produit de la masse et de la vitesse :
est définie comme produit de la masse et de la vitesse :
C'est donc, comme la vitesse, une grandeur vectorielle, dont l'unité SI est le kg  m s-1.
m s-1.
Cette grandeur est additive, ainsi pour un système matériel composé de N particules, la quantité de mouvement totale (ou résultante cinétique) du système est définie par :
 .
.
En introduisant le centre d'inertie C du système dont le vecteur position est par définition  il vient aussitôt par dérivation la relation[1]:
il vient aussitôt par dérivation la relation[1]:
autrement dit la quantité de mouvement totale du système est égale à la quantité de mouvement de son centre d'inertie C affectée de la masse totale  du système :
du système :

Cette relation est valable pour tout type de système matériel, déformable ou non.
En mécanique du solide, la quantité de mouvement est la résultante du torseur cinétique.
Quantité de mouvement et forces
Relation fondamentale de la dynamique
La relation fondamentale de la dynamique exprime le fait que l'action d'une force fait varier la quantité de mouvement du point matériel dans un référentiel galiléen[5]:

Cette relation se généralise aisément à un système matériel en ce qui concerne la quantité de mouvement totale du système, c'est-à-dire celle de son centre d'inertie C affecté de la masse totale du système[6],[7]:
Ce résultat est connu sous le nom de théorème de la résultante cinétique ou encore théorème du centre d'inertie: il montre que pour un système matériel l'action des forces extérieures conduit à une variation de la quantité de mouvement du centre d'inertie du système[8],[1].
Conservation de la quantité de mouvement

En l'absence de forces extérieures, ou si leur résultante est nulle, la quantité de mouvement d'un système matériel est donc une constante du mouvement, puisque alors  . En mécanique analytique cette loi de conservation peut être reliée à l'invariance par translation dans l'espace du Lagrangien, cf. ci-après.
. En mécanique analytique cette loi de conservation peut être reliée à l'invariance par translation dans l'espace du Lagrangien, cf. ci-après.
Une illustration classique de la conservation de la quantité de mouvement est fournie par le pendule de Newton, qui est souvent utilisé comme objet décoratif (cf. illustration ci-contre). Une bille à une extrémité est lâchée sans vitesse et acquiert une certaine quantité de mouvement, puis entre en collision avec les autres billes accolées. La bille à l'autre extrémité repart dans le même sens que la bille incidente, ayant acquis sa quantité de mouvement, qui se "transmet" à travers les billes accolées.
De façon générale, la conservation de la quantité de mouvement est très importante dans l'étude des chocs de particules ou de la désintégration (séparation en plusieurs parties) d'un système. En effet dans le cas d'un choc de deux (ou plus) corps matériel, la durée de l'interaction entre les corps est très brève et il est possible de négliger l'effet des interactions extérieures au système constitué par les corps en collision, dont la quantité de mouvement totale peut donc être considérée comme conservée. Il est important de souligner que l'énergie cinétique n'est en général pas conservée dans une collision, car il y a souvent changement de l'état interne des corps durant la collision : par exemple deux particules qui restent accolées au cours d'une collision, ce n'est que si la collision est élastique que l'énergie cinétique est conservée, en plus de la quantité de mouvement (cf. illustrations ci-contre).
Deux exemples classiques permettent d'illustrer l'application de la conservation de la quantité de mouvement dans l'étude des chocs ou de la désintégration d'un système :
- Exemple 1 : choc de plein fouet d'une boule de billard par une autre : une boule de billard de masse m heurte de plein fouet (centres alignés) à la vitesse
 une autre boule de billard de masse m' , initialement immobile. La conservation de la quantité de mouvement globale du système {boule 1 + boule 2} pendant la durée très brève du choc implique :
une autre boule de billard de masse m' , initialement immobile. La conservation de la quantité de mouvement globale du système {boule 1 + boule 2} pendant la durée très brève du choc implique :
 , soit
, soit  ,
,
où  est la variation de la vitesse de la première boule pendant le choc. Si le choc est de plein fouet alors et
est la variation de la vitesse de la première boule pendant le choc. Si le choc est de plein fouet alors et  sont colinéaires et alors la deuxième boule part à la vitesse de valeur
sont colinéaires et alors la deuxième boule part à la vitesse de valeur  . À la limite il peut y avoir transfert de la totalité de la quantité de mouvement de la première boule sur la deuxième et alors
. À la limite il peut y avoir transfert de la totalité de la quantité de mouvement de la première boule sur la deuxième et alors  .
.

- Exemple 2 : recul d'une arme à feu : lorsqu'une arme à feu est utilisée, le système {arme, masse M + balle, masse m} peut être considéré comme isolé, l'action du poids étant négligeable. Dans ce cas, et l'arme étant supposée immobile dans le référentiel d'étude, la conservation de la quantité de mouvement du système avant et après le tir implique que :
 ,
,
et  désignant respectivement la vitesse de la balle et celle de l'arme juste après le tir.
Par suite, il y a un phénomène de recul de l'arme à la vitesse
désignant respectivement la vitesse de la balle et celle de l'arme juste après le tir.
Par suite, il y a un phénomène de recul de l'arme à la vitesse  , ce qui est effectivement constaté. Le même phénomène intervient lorsqu'une personne saute d'une barque vers la berge : la barque "recule".
, ce qui est effectivement constaté. Le même phénomène intervient lorsqu'une personne saute d'une barque vers la berge : la barque "recule".

De façon générale ce phénomène permet de comprendre le principe du moteur-fusée (cf. figure ci-contre) : l'expulsion d'une masse dm de matière à la vitesse d'éjection  pendant dt conduit du fait de la conservation de la quantité de mouvement (en négligeant l'action des forces extérieures) à faire varier la vitesse de la fusée spatiale de
pendant dt conduit du fait de la conservation de la quantité de mouvement (en négligeant l'action des forces extérieures) à faire varier la vitesse de la fusée spatiale de  , par suite par intégration sur une durée finie
, par suite par intégration sur une durée finie  la vitesse de la fusée (de masse initiale m0 varie donc de
la vitesse de la fusée (de masse initiale m0 varie donc de  avec
avec  puisque la fusée perd de la masse. Par suite la fusée se déplace dans le sens opposé à la direction de la vitesse d'éjection des gaz de combustion (cf. Équation de Tsiolkovski).
puisque la fusée perd de la masse. Par suite la fusée se déplace dans le sens opposé à la direction de la vitesse d'éjection des gaz de combustion (cf. Équation de Tsiolkovski).
Notion de percussion mécanique
Une variation de quantité de mouvement consécutive à l'action d'une force est donc calculée comme étant l'intégrale de la force pendant la durée d'action de la force. Pour un objet de quantité de mouvement initiale  à un instant
à un instant  , qui subit une force
, qui subit une force  pendant une durée
pendant une durée  , l'intégrale de cette force par rapport au temps, pendant cette durée, est égale à :
, l'intégrale de cette force par rapport au temps, pendant cette durée, est égale à :

En utilisant la relation fondamentale de la dynamique  , on obtient :
, on obtient :

L'usage, dérivé de l'appellation anglo-saxonne impulse, est d'appeler cette grandeur impulsion. Néanmoins, en toute rigueur, en français impulsion désigne le moment conjugué, grandeur de la mécanique lagrangienne. Lorsque la durée d'action de la force est très courte, la grandeur  précédente est appelée percussion mécanique, en raison de son importance dans la théorie des chocs.
précédente est appelée percussion mécanique, en raison de son importance dans la théorie des chocs.
Définition en mécanique analytique
En mécanique lagrangienne, l'état d'un système de N particules (3N degrés de liberté) est décrit par son Lagrangien noté  , où
, où  et
et  désigne les coordonnées et vitesses généralisées sous formes vectorielles de la i-ème particule (i=1,...,N).
désigne les coordonnées et vitesses généralisées sous formes vectorielles de la i-ème particule (i=1,...,N).
Notion de moment conjugué ou impulsion généralisée
Pour chaque particule il est possible de définir le moment conjugué (ou impulsion généralisée) de par la relation[9],[10]:

Le symbole  désignant l'opérateur gradient évalué par rapport aux composantes de la vitesse généralisée de la i-ème particule.
désignant l'opérateur gradient évalué par rapport aux composantes de la vitesse généralisée de la i-ème particule.
D'après les équations de Lagrange, qui s'écrivent avec les mêmes notations 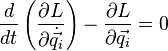 il vient aussitôt
il vient aussitôt  , et si la coordonnée est cyclique, c'est-à-dire que le lagrangien L ne dépend pas de celle-ci, alors
, et si la coordonnée est cyclique, c'est-à-dire que le lagrangien L ne dépend pas de celle-ci, alors  et donc le moment conjugué
et donc le moment conjugué  est conservé[11].
est conservé[11].
Distinction moment conjugué - quantité de mouvement
La notion de moment conjugué ne correspond pas en général à celle de la quantité de mouvement.
Par exemple, dans le cas du mouvement d'un seul point matériel dans un potentiel central V(r), ne dépendant que de la distance r à une origine O, le mouvement est plan (2 degrés liberté) et le Lagrangien du système peut s'écrire aisément en coordonnées cylindro-polaires sous la forme :
 ,
,
et le moment conjugué de  est donc
est donc  qui est la valeur du moment cinétique de la particule (qui dans ce cas est conservée car L ne dépend pas de θ).
qui est la valeur du moment cinétique de la particule (qui dans ce cas est conservée car L ne dépend pas de θ).
Ce n'est que si les coordonnées généralisées coïncident avec les coordonnées cartésiennes (i.e.  ) ET en l'absence de champ électromagnétique que
) ET en l'absence de champ électromagnétique que  et donc que le moment conjugué correspond à la quantité de mouvement de chaque particule. En effet dans ce cas les équations de Lagrange s'identifient avec celles données par la relation fondamentale de dynamique appliquée à chaque particule.
et donc que le moment conjugué correspond à la quantité de mouvement de chaque particule. En effet dans ce cas les équations de Lagrange s'identifient avec celles données par la relation fondamentale de dynamique appliquée à chaque particule.
Si les coordonnées cartésiennes sont utilisées et que les particules, qui portent une charge  sont en présence d'un champ électromagnétique, défini par les potentiels scalaire vecteur du champ notés
sont en présence d'un champ électromagnétique, défini par les potentiels scalaire vecteur du champ notés  , le Lagrangien du système fait intervenir le potentiel généralisé :
, le Lagrangien du système fait intervenir le potentiel généralisé : [12],
[12],
et dans ce cas le moment conjugué s'écrit du fait des équations de Lagrange
 , en notant
, en notant  la quantité de mouvement de la particule.
la quantité de mouvement de la particule.
Le moment conjugué  est alors dans ce cas désigné sous le nom d'impulsion pour le distinguer de la quantité de mouvement
est alors dans ce cas désigné sous le nom d'impulsion pour le distinguer de la quantité de mouvement  .
.
Quantité de mouvement et invariance par translation dans l'espace
Une translation infinitésimale du système dans l'espace est défini par la transformation  appliquée à chaque particule,
appliquée à chaque particule,  étant le vecteur de translation élémentaire. Il est évident puisque
étant le vecteur de translation élémentaire. Il est évident puisque  que cette translation laisse inchangée les vecteurs vitesses
que cette translation laisse inchangée les vecteurs vitesses  des particules, qui coïncident avec les vitesses généralisées pour les coordonnées cartésiennes.
des particules, qui coïncident avec les vitesses généralisées pour les coordonnées cartésiennes.
Si le Lagrangien du système est invariant par translation dans l'espace, alors nécessairement sa variation élémentaire  correspondante est nulle au premier ordre en .
correspondante est nulle au premier ordre en .
D'après les équations de Lagrange, et en opérant en coordonnées cartésiennes, cette condition s'écrit sous la forme :
 ,
,
or la translation élémentaire  envisagée étant arbitraire, l'invariance par translation du Lagrangien implique que la quantité de mouvement totale du système
envisagée étant arbitraire, l'invariance par translation du Lagrangien implique que la quantité de mouvement totale du système  est conservée[13].
est conservée[13].
Ainsi la quantité de mouvement apparaît naturellement en mécanique analytique comme la grandeur conservée associée à l'invariance par translation du Lagrangien (ou du Hamiltonien), c'est-à-dire à la propriété d'homogénéité de l'espace. Il s'agit d'un cas particulier du théorème de Noether.
Formalisme hamiltonien
Dans le formalisme hamiltonien la description de l'état du système à N degrés de liberté se fait en terme des N coordonnées et impulsions généralisées  et
et  , qui interviennent dans l'expression du Hamiltonien
, qui interviennent dans l'expression du Hamiltonien  du système.
du système.
Il est possible d'introduire le crochet de Poisson de deux grandeurs arbitraires  et
et  fonction des coordonnées et impulsions généralisées, défini par :
fonction des coordonnées et impulsions généralisées, défini par :
 .
.
Dans le cas particulier où  et
et  il vient
il vient  : ce résultat permet de généraliser la notion de position et de quantité de mouvement en mécanique quantique, en permettant de définir par le principe de correspondance une relation de commutation canonique entre les deux opérateurs.
: ce résultat permet de généraliser la notion de position et de quantité de mouvement en mécanique quantique, en permettant de définir par le principe de correspondance une relation de commutation canonique entre les deux opérateurs.
Quantité de mouvement en mécanique relativiste
La quantité de mouvement est une grandeur conservée lors de transformations de translation. Sinon, cela impliquerait une modification sans cause de la position du centre de gravité d'un système de deux corps élastiques qui se percutent.
Aussi, lorsqu'Albert Einstein formula sa théorie de la relativité restreinte, il adapta la définition de la quantité de mouvement afin que celle-ci soit également conservée lors de transformations relativistes.
En mécanique relativiste, il n'est pas possible de séparer les coordonnées d'espace et de temps, aussi il est utile de définir des quadrivecteurs comportant une composante temporelle et trois d'espace : ainsi le vecteur position  de la mécanique classique se généralise en un quadrivecteur position-temps
de la mécanique classique se généralise en un quadrivecteur position-temps  .
.
Le carré de la norme d'un tel quadrivecteur est donné par  en utilisant la signature
en utilisant la signature  . Cette quantité est invariante par toute transformation de Lorentz.
. Cette quantité est invariante par toute transformation de Lorentz.
Il est alors possible de définir le quadrivecteur vitesse en dérivant "par rapport au temps propre" de la particule  :
:

où représente le vecteur vitesse "ordinaire" de la particule, et  est un facteur appelé gamma relativiste ou facteur de Lorentz,
est un facteur appelé gamma relativiste ou facteur de Lorentz,  étant la vitesse de la lumière. Le carré de la norme de ce quadrivecteur est donné par
étant la vitesse de la lumière. Le carré de la norme de ce quadrivecteur est donné par  .
.
Le quadrivecteur impulsion-énergie qui généralise en mécanique relativiste la notion de quantité de mouvement s'obtient en considérant  par analogie avec la définition classique, ce qui donne
par analogie avec la définition classique, ce qui donne  , avec:
, avec:
-
 , énergie relativiste de la particule, et
, énergie relativiste de la particule, et -
 quantité de mouvement relativiste de la particule.
quantité de mouvement relativiste de la particule.
Le carré de la norme de ce quadrivecteur est la grandeur qui reste invariante lors d'une transformation de Lorentz, et qui est nécessairement égale au carré de la norme de  soit
soit  , par suite
, par suite

Les objets de masse nulle, tels que les photons, possèdent aussi un 4-moment où la pseudo-norme du quadrivecteur p est nulle. On a dans ce cas :
 d'où
d'où  pour la norme de la quantité de mouvement classique.
pour la norme de la quantité de mouvement classique.
Impulsion du champ électromagnétique
La notion de quantité de mouvement n'est pas limitée à un corps matériel, mais peut être étendue à un champ comme le champ électromagnétique, pour lequel elle porte plutôt le nom d'impulsion, pour éviter toute confusion. L'impulsion du champ électromagnétique correspondant à un volume (V) est donnée par :
 .
.
La quantité  correspond à la densité d'impulsion électromagnétique, c'est-à-dire à l'impulsion du champ électromagnétique par unité de volume. Elle est directement liée au vecteur de Poynting
correspond à la densité d'impulsion électromagnétique, c'est-à-dire à l'impulsion du champ électromagnétique par unité de volume. Elle est directement liée au vecteur de Poynting  puisque
puisque  .
.
Il est possible de montrer que cette quantité correspond bien à la densité d'impulsion liée au champ électromagnétique en considérant son interaction avec les charges et les courants présents dans un volume (V) arbitraire, délimité par la surface fermée (S)[14]: de par la conservation de l'impulsion du système global {charges + courants + champ e.m}, la variation des densités d'impulsions des charges et courants et du champ doit être égale au flux de densité d'impulsion à travers la surface (S).
L'interaction entre le champ et les charges et les courants fait intervenir la densité de force de Lorentz  , or d'après les équations de Maxwell il vient:
, or d'après les équations de Maxwell il vient:
- pour la densité de charge :
 ,
, - pour la densité de courant :
 ,
,
ce qui donne par substitution:
 ,
,
or d'après l'identité  il vient :
il vient :
 ,
,
le terme de droite pouvant être rendu plus symétrique en utilisant les deux équations de Maxwell donnant la structure du champ:
-
 ,
, -
 ,
,
ce qui donne finalement :
 ,
,
le terme de droite peut alors se mettre sous la forme de la divergence du tenseur de Maxwell:
 ,
,
soit finalement :
 ,
,
cette dernière équation apparaît bien sous la forme d'une équation locale de bilan, le terme de gauche donnant la variation temporelle de la densité locale d'impulsion du système des charges et courants ( ) et du champ (terme en
) et du champ (terme en 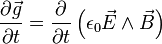 ), le terme de droite correspondant aux échanges avec le reste. Ainsi
), le terme de droite correspondant aux échanges avec le reste. Ainsi  peut être assimilé à la densité d'impulsion du champ électromagnétique.
peut être assimilé à la densité d'impulsion du champ électromagnétique.
Quantité de mouvement en mécanique quantique
En mécanique quantique, l'état d'un système à un instant t est décrite par un vecteur d'état noté  appartenant à l'espace des états
appartenant à l'espace des états  du système (celui-ci possède une structure d'espace de Hilbert). Les différentes grandeurs physiques usuelles (position, énergie, etc.) sont alors des opérateurs hermitiens, donc à valeurs propres réelles, appelé observables.
du système (celui-ci possède une structure d'espace de Hilbert). Les différentes grandeurs physiques usuelles (position, énergie, etc.) sont alors des opérateurs hermitiens, donc à valeurs propres réelles, appelé observables.
La notion de quantité de mouvement d'une particule, plus souvent appelée impulsion correspond à un opérateur, en fait un ensemble de trois opérateurs correspondant chacun aux trois composantes d'espaces, dits opérateurs scalaires, qu'il est possible de regrouper, par analogie avec le cas classique en un opérateur dit vectoriel, dit opérateur impulsion, noté  .
.
Opérateur position et impulsion - relations de commutation canoniques
Par définition, l'opérateur de position  et l'opérateur de impulsion sont des opérateurs vectoriels, dont les trois opérateurs scalaires agissant sur les différentes composantes j=x,y,z correspondent aux diverses directions d'espace et obéissent aux relations de commutation canoniques suivantes :
et l'opérateur de impulsion sont des opérateurs vectoriels, dont les trois opérateurs scalaires agissant sur les différentes composantes j=x,y,z correspondent aux diverses directions d'espace et obéissent aux relations de commutation canoniques suivantes :
![\begin{cases}
\left[\hat{\mathbf{x}}_j,\hat{\mathbf{p}}_k\right]=i\hbar \delta_{jk}\hat{1} \\
\left[\hat{\mathbf{p}}_j,\hat{\mathbf{p}}_k\right]= \left[\hat{\mathbf{x}}_j,\hat{\mathbf{x}}_k\right]=0
\end{cases}](../i/m/38f013931f60523108905db2071abc19.png)
{kind=link}
La première relation de commutation se déduit formellement par analogie avec le crochet de Poisson  entre coordonnées et impulsions généralisées en mécanique hamiltonienne, en appliquant la prescription (principe de correspondance):
entre coordonnées et impulsions généralisées en mécanique hamiltonienne, en appliquant la prescription (principe de correspondance): ![[\hat{x}_j,\hat{p}_k] \quad \leftrightarrow \quad i\hbar\{x_j,p_k\}](../i/m/cd15d121681bd4e03f724a5f228496a7.png) .
.
La non-commutativité entre  et
et  (idem pour les autres composantes) implique qu'il n'est pas possible de mesurer simultanément la position et la quantité de mouvement (et donc la vitesse) d'une particule. Il existe donc des inégalités, dites de Heisenberg, sur les écart-types moyens notés
(idem pour les autres composantes) implique qu'il n'est pas possible de mesurer simultanément la position et la quantité de mouvement (et donc la vitesse) d'une particule. Il existe donc des inégalités, dites de Heisenberg, sur les écart-types moyens notés  et
et  de la mesure de chacune des deux grandeurs:
de la mesure de chacune des deux grandeurs: 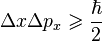 .
.
La conséquence de ces relations est que la notion de trajectoire n'existe pas pour une particule quantique, la description est probabiliste.
De façon heuristique, cette situation peut aisément se comprendre. En effet si l'on cherche à localiser avec précision une particule, il faut utiliser une onde de courte longueur d'onde, donc de grande énergie. Or cette énergie va être nécessairement transmise, en tout ou en partie à la particule, modifiant de façon appréciable sa quantité de mouvement. Il sera possible d'utiliser une onde de plus grande longueur d'onde, mais alors l'incertitude sur la mesure de la position augmentera.
Expression en représentation position
En représentation position, où l'état du système peut être décrit par sa fonction d'onde  , l'opérateur position pour une composante x donnée correspond simplement à la multiplication de la fonction d'onde par celle-ci:
, l'opérateur position pour une composante x donnée correspond simplement à la multiplication de la fonction d'onde par celle-ci:
 ,
,
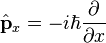
il est alors facile de vérifier que du fait de la relation de commutation canonique entre  et
et  la quantité de mouvement dans la direction
la quantité de mouvement dans la direction  , pour une particule sans charge électrique et sans spin, est donné par l'opérateur :
, pour une particule sans charge électrique et sans spin, est donné par l'opérateur :
 ,
,
l'opérateur vectoriel de quantité de mouvement s'écrit ainsi sous forme intrinsèque :
 .
.
Expression en représentation impulsion
En représentation impulsion l'état du système est décrit par la fonction d'onde "en impulsion"  , l'opérateur impulsion pour une composante x donnée correspond simplement à la multiplication de la fonction d'onde par celui-ci:
, l'opérateur impulsion pour une composante x donnée correspond simplement à la multiplication de la fonction d'onde par celui-ci:
 ,
,
il est alors facile de vérifier que du fait de la relation de commutation canonique entre et l'expression de l'opérateur position , pour une particule sans charge électrique et sans spin, est donné par:
 ,
,
l'opérateur vectoriel de position s'écrit ainsi dans cette représentation sous forme intrinsèque :
 .
.
États propres et conservation de l'impulsion
Les états propres de l'opérateur quantité de mouvement, c'est-à-dire les états pour lequel la quantité de mouvement de la particule a une valeur déterminée, sont donnés en représentation position à une dimension selon x par l'équation aux valeurs propres :
 soit
soit 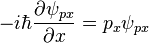 , il vient aussitôt
, il vient aussitôt  .
.
La valeur de  n'est pas quantifiée a priori, sauf si des conditions particulières sont imposées à la particule, par exemple si elle confinée dans une boîte.
n'est pas quantifiée a priori, sauf si des conditions particulières sont imposées à la particule, par exemple si elle confinée dans une boîte.
Ce résultat se généralise aussitôt à trois dimensions sous la forme  , où
, où  est le vecteur d'onde de la particule. Ces états ne sont pas normalisables au sens usuel (ce ne sont pas des fonctions de carré sommable), mais il est possible de les normaliser "au sens des distributions":
est le vecteur d'onde de la particule. Ces états ne sont pas normalisables au sens usuel (ce ne sont pas des fonctions de carré sommable), mais il est possible de les normaliser "au sens des distributions":
 .
.
Avec cette condition de normalisation il est possible de montrer que  , en prenant pour convention de phase C réel[15] et les états propres normalisés de l'opérateur impulsion s'écrivent ainsi en représentation position:
, en prenant pour convention de phase C réel[15] et les états propres normalisés de l'opérateur impulsion s'écrivent ainsi en représentation position:
 .
.
Pour un système stationnaire, l'opérateur hamiltonien du système s'exprime en fonction de l'opérateur quantité de mouvement :  (particule sans spin en l'absence de champ magnétique). En général du fait de la non-commutation entre opérateur impulsion et position, les états propres de l'impulsion ne sont pas états propres du hamiltonien.
(particule sans spin en l'absence de champ magnétique). En général du fait de la non-commutation entre opérateur impulsion et position, les états propres de l'impulsion ne sont pas états propres du hamiltonien.
Toutefois, dans le cas d'une particule libre  dans tout l'espace, et les états propres du hamiltonien sont ceux de l'impulsion, car alors et
dans tout l'espace, et les états propres du hamiltonien sont ceux de l'impulsion, car alors et  commutent entre eux. Les états propres d'énergie
commutent entre eux. Les états propres d'énergie  ne sont donc pas quantifiés, et sont qualifiés de continus. Ils correspondent chacun à une valeur donnée de l'impulsion[16]. Cette situation correspond en mécanique quantique à la conservation de la quantité de mouvement classique.
ne sont donc pas quantifiés, et sont qualifiés de continus. Ils correspondent chacun à une valeur donnée de l'impulsion[16]. Cette situation correspond en mécanique quantique à la conservation de la quantité de mouvement classique.
La fonction d'onde "complète" d'un tel système, c'est-à-dire la solution de l'équation de Schrödinger dépendant du temps, est alors donnée par  [17], avec
[17], avec  , fréquence associée à l'énergie E. Les états propres ont donc la forme d'ondes progressives, traduisant sur le plan quantique le déplacement classique de la particule selon la direction de l'impulsion.
, fréquence associée à l'énergie E. Les états propres ont donc la forme d'ondes progressives, traduisant sur le plan quantique le déplacement classique de la particule selon la direction de l'impulsion.
Le caractère continu de ces états propres de l'impulsion disparaît si la particule n'est plus strictement libre, mais confinée dans une région donnée de l'espace ("barrière de potentiel infinie"). Du point de vue mathématique cela revient à imposer des conditions aux limites à la fonction d'onde, qui devra s'annuler sur la "frontière" de la "boîte" dans laquelle est confinée la particule, puisque celle-ci a une probabilité de présence nulle en dehors de cette région. Ces conditions aux limites se traduisent physiquement par une quantification de l'énergie et donc de l'impulsion (cf. pour plus de détail l'article Particule dans une boîte). Les états propres correspondants se mettront sous la forme d'une somme des états propres libres, et correspondront à des ondes stationnaires, traduisant sur le plan quantique le confinement de la particule, cf. figure ci-contre.
Notes et références
- 1 2 3 4 Voir notamment Perez, Cours de physique : mécanique - 4e édition, Masson, Paris, 2001.
- ↑ C. Cohen-Tannoudji, B. Diu et F. Laloë, Mécanique quantique [détail de l’édition], tome I, 1977, chap. III, B, p. 225.
- ↑ Voir également en mécanique classique Lev Landau et Evguéni Lifchitz, Physique théorique [détail des éditions] et Herbert Goldstein, Charles P. Poole Jr., John L. Safko, Classical mechanics [détail des éditions]
- ↑ Ainsi pour une particule libre de masse m en coordonnées sphériques, le lagrangien L est donné par
 , et les moments conjugués sont donc
, et les moments conjugués sont donc  ,
,  et
et  . Seul
. Seul  , qui est le moment conjugué d'une variable linéaire, coïncide avec une quantité de mouvement (ici composante radiale), les deux autres moments conjugués de variables angulaires coïncident eux avec les deux composantes du moment cinétique de la particule, appelé parfois aussi pour cette raison moment angulaire.
, qui est le moment conjugué d'une variable linéaire, coïncide avec une quantité de mouvement (ici composante radiale), les deux autres moments conjugués de variables angulaires coïncident eux avec les deux composantes du moment cinétique de la particule, appelé parfois aussi pour cette raison moment angulaire. - ↑ Pour un référentiel non-galiléen il faut considérer en plus des forces "réelles" agissant sur le point matériel, c'est-à-dire des forces liées à l'action d'un autre corps matériel sur le système, des forces dite d'inertie ou de repère, liées uniquement à son caractère non-inertiel, cf. notamment Perez, op. cit..
- ↑ La démonstration de ce résultat fait intervenir la loi de l'action et de la réaction ou troisième loi de Newton, cf. Perez, op. cit.
- ↑ Là encore pour un référentiel non-galiléen, il faut tenir compte de l'action des forces d'inertie.
- ↑ Ce résultat est valable pour tous les systèmes matériels, et pas seulement pour les solides.
- ↑ Cette notion permet de passer au formalisme hamiltonien par transformation de Legendre sur .
- ↑ La grandeur définie par
 est appelée parfois force généralisée. Elle ne correspond pas en général à la notion de force en mécanique de Newton, sauf en coordonnées cartésiennes.
est appelée parfois force généralisée. Elle ne correspond pas en général à la notion de force en mécanique de Newton, sauf en coordonnées cartésiennes. - ↑ Si seule la composante
 de cette coordonnée généralisée est cyclique, seule la composante correspondante
de cette coordonnée généralisée est cyclique, seule la composante correspondante  du moment se conservera : cf. exemple ci-après.
du moment se conservera : cf. exemple ci-après. - ↑ Voir notamment Herbert Goldstein, Charles P. Poole Jr., John L. Safko, Classical mechanics [détail des éditions] à ce sujet.
- ↑ Voir à ce sujet Lev Landau et Evguéni Lifchitz, Physique théorique, tome 1 : Mécanique [détail des éditions].
- ↑ Le volume (V) est considéré comme simplement connexe.
- ↑ Cf. Lev Landau et Evguéni Lifchitz, Physique théorique, tome 3 : Mécanique quantique [détail des éditions], §15.
- ↑ Il existe une description alternative, en écrivant l'équation de Schrödinger en coordonnées sphérique et en tenant compte de la séparation radiale-angulaire du fait du caractère "central" de l'absence de potentiel. Dans ce cas les différents états propres sont de la forme
 où
où  sont les harmoniques sphériques et
sont les harmoniques sphériques et  est la fonction radiale dont l'expression fait intervenir les fonctions de Bessel sphériques. Ces états propres correspondent alors à des valeurs déterminées - et nécessairement quantifiées - du moment cinétique. Il est possible, dans la mesure où ces états à symétrie sphérique forment une base complète, de développer les états propres de l'impulsion sur cette base: ceci est utilisé notamment en théorie de la diffusion quantique. Cf. à ce sujet Lev Landau et Evguéni Lifchitz, Physique théorique, tome 3 : Mécanique quantique [détail des éditions]
est la fonction radiale dont l'expression fait intervenir les fonctions de Bessel sphériques. Ces états propres correspondent alors à des valeurs déterminées - et nécessairement quantifiées - du moment cinétique. Il est possible, dans la mesure où ces états à symétrie sphérique forment une base complète, de développer les états propres de l'impulsion sur cette base: ceci est utilisé notamment en théorie de la diffusion quantique. Cf. à ce sujet Lev Landau et Evguéni Lifchitz, Physique théorique, tome 3 : Mécanique quantique [détail des éditions] - ↑ Il convient de rappeler que si le hamiltonien est stationnaire, la solution générale de l'équation de Schrödinger dépendante du temps est de la forme
 , avec
, avec  solution de l'équation de Schrödinger stationnaire
solution de l'équation de Schrödinger stationnaire  .
.
Articles connexes
- Énergie cinétique
- Moment cinétique
- Quantité d'accélération
- Collision
- Le quadrivecteur énergie-impulsion en relativité restreinte
Bibliographie
- Quantité de mouvement en mécanique classique ou relativiste :
- Perez, Cours de physique : mécanique - 4e édition, Masson, Paris, 2001 (pour une introduction au niveau 1er cycle).
- Lev Landau et Evguéni Lifchitz, Physique théorique, tome 1 : Mécanique [détail des éditions] (niveau avancé, dans le cadre du formalisme de la mécanique analytique, en mettant l'accent sur le lien symétrie / loi de conservation).
- Lev Landau et Evguéni Lifchitz, Physique théorique, tome 2 : Théorie des champs [détail des éditions] (pour la mécanique relativiste).
- Herbert Goldstein, Charles P. Poole Jr., John L. Safko, Classical mechanics [détail des éditions] (une référence classique, de niveau 2ème à 3ème cycle, qui aborde également la mécanique relativiste).
- Quantité de mouvement en mécanique quantique :
- C. Cohen-Tannoudji, B. Diu et F. Laloë, Mécanique quantique [détail de l’édition] (une référence classique pour l'introduction à la mécanique quantique).
- Albert Messiah, Mécanique quantique [détail des éditions] (autre référence classique plus ancienne).
- Lev Landau et Evguéni Lifchitz, Physique théorique, tome 3 : Mécanique quantique [détail des éditions] (un très bon ouvrage, à un niveau avancé).
- R. Shankar, Principles of Quantum Mechanics, 2nd Edition, Plenum Press, New York, 1994.
Liens externes
- Quelques animations ou vidéos illustrant la conservation de la quantité de mouvement :
- (fr) Une animation très intéressante, dans le cas d'une collision inélastique
- (en) Une démonstration du pendule de Newton
- (en) L'astronaute richard Garriot illustre la conservation de la quantité de mouvement
 Portail de la physique
Portail de la physique