Cinemática
Antecedentes
SOS Children hizo esta selección Wikipedia junto a otros recursos de escuelas . Haga clic aquí para obtener más información sobre SOS Children.
Cinemática ( griego κινειν, kinein, se mueva) es una rama de la dinámica que describe el movimiento de objetos sin la consideración de las masas o las fuerzas que ponen en evidencia el movimiento. En contraste, cinética se ocupa de las fuerzas y interacciones que producen o afectan al movimiento.
La aplicación más simple de la cinemática es señalar el movimiento de partículas ( cinemática de la traducción o la cinemática lineal). La descripción de rotación ( cinemática de rotación o la cinemática angulares) es más complicado. El estado de un cuerpo rígido genérico puede ser descrita por la combinación tanto de traslación y de rotación cinemática ( la cinemática del cuerpo rígido). Un caso más complicado es la cinemática de un sistema de cuerpos rígidos, posiblemente vinculados entre sí por medios mecánicos articulaciones. La descripción cinemática del flujo de fluido es aún más complicada, y no generalmente considerado en el contexto de la cinemática.
Movimiento de traslación
Traslacional o curvilíneas cinemática es la descripción del movimiento en el espacio de un punto a lo largo de una trayectoria. Este camino puede ser lineal o curvada como se ve con el movimiento de proyectiles. Hay tres conceptos básicos que se requieren para la comprensión de movimiento de traslación:
- El desplazamiento es la distancia más corta entre dos puntos: el origen y el punto desplazado. El origen es (0,0) en un sistema que se define por el observador de coordenadas. Debido a que el desplazamiento tiene tanto magnitud (longitud) y la dirección, es un vector cuyo punto inicial es el origen y el punto terminal es el punto desplazado.
- La velocidad es la velocidad de cambio en el desplazamiento con respecto al tiempo; que es el desplazamiento de un punto cambia con el tiempo. La velocidad es también un vector. Para una velocidad constante, cada unidad de tiempo se suma la longitud del vector de velocidad (en la misma dirección) para el desplazamiento del punto móvil. Velocidad instantánea (la velocidad en un instante de tiempo) se define como
 , Donde ds es un desplazamiento infinitesimal y dt es un infinitamente pequeño periodo de tiempo. Velocidad media (velocidad en una longitud de tiempo) se define como
, Donde ds es un desplazamiento infinitesimal y dt es un infinitamente pequeño periodo de tiempo. Velocidad media (velocidad en una longitud de tiempo) se define como  , Donde? S es el cambio en el desplazamiento y? T es el intervalo de tiempo durante el cual desviación modifica.
, Donde? S es el cambio en el desplazamiento y? T es el intervalo de tiempo durante el cual desviación modifica. - La aceleración es la tasa de cambio en la velocidad con respecto al tiempo. La aceleración es también un vector. Al igual que con la velocidad si la aceleración es constante, por cada unidad de tiempo de la longitud del vector de aceleración (en la misma dirección) se añade a la velocidad. Si se conoce el cambio en la velocidad (un vector), la aceleración es paralela a ella. La aceleración instantánea (la aceleración en un instante de tiempo) se define como
 , Donde dv es un infinitamente pequeño cambio en la velocidad y dt es un infinitamente pequeño periodo de tiempo. Aceleración media (aceleración en una longitud de tiempo) se define como
, Donde dv es un infinitamente pequeño cambio en la velocidad y dt es un infinitamente pequeño periodo de tiempo. Aceleración media (aceleración en una longitud de tiempo) se define como  , Donde? V es el cambio en la velocidad y Dt es el intervalo de tiempo durante el cual los cambios de velocidad.
, Donde? V es el cambio en la velocidad y Dt es el intervalo de tiempo durante el cual los cambios de velocidad.
Cuando la aceleración es constante, se dice que está sometido a movimiento uniformemente acelerado. Si este es el caso, hay cuatro ecuaciones que se pueden utilizar para describir el movimiento de un objeto.
 Aquellos que están familiarizados con el cálculo puede reconocer esto como un problema de valor inicial. Debido a la aceleración (a) es una constante, integrándolo con respecto al tiempo (t) da un cambio de velocidad. La adición de este a la velocidad inicial (v 0) da la velocidad final (v).
Aquellos que están familiarizados con el cálculo puede reconocer esto como un problema de valor inicial. Debido a la aceleración (a) es una constante, integrándolo con respecto al tiempo (t) da un cambio de velocidad. La adición de este a la velocidad inicial (v 0) da la velocidad final (v).  Utilizando la fórmula anterior, podemos sustituir v para llegar a esta ecuación, donde s es el desplazamiento.
Utilizando la fórmula anterior, podemos sustituir v para llegar a esta ecuación, donde s es el desplazamiento.  Mediante el uso de la definición de un media, y el conocimiento que los tiempos de velocidad media de tiempo es igual a desplazamiento, podemos llegar a esta ecuación.
Mediante el uso de la definición de un media, y el conocimiento que los tiempos de velocidad media de tiempo es igual a desplazamiento, podemos llegar a esta ecuación. 
Velocidad relativa
Para describir el movimiento de un objeto A con respecto al objeto O, cuando sabemos cómo cada uno se mueve con respecto al objeto B, se utiliza la siguiente ecuación que los vectores y la suma de vectores:

La ecuación de movimiento relativo por encima de afirma que el movimiento de una respecto a O es igual al movimiento de B respecto a O, más el movimiento de A con respecto a B.
Por ejemplo, vamos a Ann mueva con velocidad  y dejar que Bob mueva con velocidad
y dejar que Bob mueva con velocidad  , Cada velocidad dada con respecto al suelo. Para saber qué tan rápido Ann está moviendo en relación con Bob (que llamamos esta velocidad
, Cada velocidad dada con respecto al suelo. Para saber qué tan rápido Ann está moviendo en relación con Bob (que llamamos esta velocidad  ), La ecuación anterior da:
), La ecuación anterior da:

Encontrar simplemente cambiando esta ecuación para obtener:

A velocidades comparables a la velocidad de la luz , estas ecuaciones no son válidos. Son reemplazados por las ecuaciones de Einstein derivados de la teoría de la relatividad especial .
Ejemplo: rectilíneo (1D) movimiento  Un objeto se disparó hacia arriba, alcanza su cima, y entonces comienza su descenso bajo una aceleración constante.
Un objeto se disparó hacia arriba, alcanza su cima, y entonces comienza su descenso bajo una aceleración constante.
Considere la posibilidad de un objeto que se disparó directamente hacia arriba y cae de nuevo a la tierra de modo que su trayectoria está contenida en una línea recta. Si adoptamos la convención de que la dirección hacia arriba es el sentido positivo, el objeto experimenta una aceleración constante de aproximadamente -9,81 m / s 2. Por lo tanto, su movimiento se puede modelar con las ecuaciones que gobiernan el movimiento uniformemente acelerado.
Por el bien de ejemplo, supongamos que el objeto tiene una velocidad inicial de 50 m / s. Hay varias preguntas cinemáticas interesantes que podemos hacer sobre el movimiento de la partícula:
¿Cuánto tiempo estar en el aire?
Para responder a esta pregunta, aplicamos la fórmula
Dado que la pregunta pide la longitud de tiempo entre el objeto de salir de la tierra y golpear el suelo en su caída, el desplazamiento es cero.
Nos encontramos con dos soluciones para ello. La solución trivial dice que el tiempo es cero; esto es en realidad también es cierto, que es el primer momento en que el desplazamiento es cero: sólo cuando se inicia el movimiento. Sin embargo, la solución de interés es
¿Qué altitud va a llegar antes de que comience a caer?
En este caso, se utiliza el hecho de que el objeto tiene una velocidad de cero en el vértice de su trayectoria. Por lo tanto, la ecuación aplicable es:
Si el origen de nuestro sistema de coordenadas está en el suelo, y luego
 es cero. Luego calculamos
es cero. Luego calculamos  y sustituir los valores conocidos:
y sustituir los valores conocidos: ¿Cuál será su velocidad final es cuando se llega a la tierra?
Para responder a esta pregunta, usamos el hecho de que el objeto tiene una velocidad inicial de cero en el vértice antes de que comience su descenso. Podemos utilizar la misma ecuación se utilizó para la última pregunta, utilizando el valor de 127.55 m de
. Asumiendo este experimento se realizó en un vacío (anulando los efectos de arrastre), nos encontramos con que las velocidades inicial y final son iguales, un resultado que está de acuerdo con conservacion de energia.





Ejemplo: Proyectil (2D) de movimiento  Un objeto disparó a un ángulo
Un objeto disparó a un ángulo  desde el suelo sigue una trayectoria parabólica.
desde el suelo sigue una trayectoria parabólica. Supongamos que un objeto no se dispara verticalmente pero se disparó a un ángulo
desde abajo. El objeto se siga una trayectoria parabólica, y su movimiento horizontal puede ser modelada de forma independiente de su movimiento vertical. Supongamos que el objeto se cuece a una velocidad inicial de 50 m / s y 30 grados desde la horizontal. ¿Hasta dónde va a viajar antes de llegar al suelo?
El objeto experimenta una aceleración de -9,81 ms -2 en la dirección vertical y no la aceleración en la dirección horizontal. Por lo tanto, el desplazamiento horizontal es
Con el fin de resolver esta ecuación, tenemos que encontrar t. Esto se puede hacer mediante el análisis del movimiento en la dirección vertical. Si imponemos que el desplazamiento vertical es cero, podemos utilizar el mismo procedimiento que hicimos para el movimiento rectilíneo de encontrar t.
Ahora despejamos t y sustituimos esta expresión en la expresión original de desplazamiento horizontal. (Tenga en cuenta el uso de la identidad trigonométrica
 )
)



{kind=link}
El movimiento de rotación
Cinemática rotacional es la descripción de la rotación de un objeto e implica la definición y el uso de los siguientes tres cantidades:
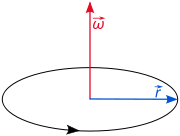
Posición angular: Si un vector se define como la distancia orientado desde el eje de rotación a un punto de un objeto, la posición angular de ese punto es el ángulo orientado de un eje de referencia (por ejemplo, los X-semieje positivo) a ese vector. Un ángulo orientado es un ángulo de barrido alrededor de un eje de rotación conocido y en un sentido de rotación conocido. En la cinemática de dos dimensiones (la descripción del movimiento planar), el eje de rotación es normal a la trama de referencia y pueden ser representados por un punto de rotación (o central), y el sentido de rotación está representado por el signo del ángulo (típicamente, un signo positivo significa sentido antihorario). El desplazamiento angular puede ser considerada como una posición relativa. Se representa por el ángulo orientado barrida por el punto antes mencionado (o vector), desde una posición angular a otra.
La velocidad angular: La magnitud de la velocidad angular  es la velocidad a la que la posición angular cambios con respecto al tiempo t:
es la velocidad a la que la posición angular cambios con respecto al tiempo t:

Aceleración angular: La magnitud de la aceleración angular  es la velocidad a la que la velocidad angular cambios con respecto al tiempo t:
es la velocidad a la que la velocidad angular cambios con respecto al tiempo t:

Las ecuaciones de la cinemática de traslación se pueden extender fácilmente a planar cinemática rotacional con intercambios variables simples:


.
Aquí  y
y  son, respectivamente, las posiciones angulares inicial y final,
son, respectivamente, las posiciones angulares inicial y final,  y
y  son, respectivamente, las velocidades angulares inicial y final, y
son, respectivamente, las velocidades angulares inicial y final, y  es la aceleración angular constante. Aunque la posición en el espacio y la velocidad en el espacio son dos vectores reales (en términos de sus propiedades en la rotación), como es la velocidad angular, ángulo de sí mismo no es un verdadero vector.
es la aceleración angular constante. Aunque la posición en el espacio y la velocidad en el espacio son dos vectores reales (en términos de sus propiedades en la rotación), como es la velocidad angular, ángulo de sí mismo no es un verdadero vector.
Sistemas de coordenadas
En cualquier situación dada, las coordenadas más útiles pueden ser determinadas por restricciones en el movimiento, o por la naturaleza geométrica de la fuerza que causa o que afectan a la moción. Por lo tanto, para describir el movimiento de un cordón obligado a moverse a lo largo de un aro circular, el más útil de coordenadas puede ser su ángulo en el aro. Del mismo modo, para describir el movimiento de una partícula actúa una fuerza central, las coordenadas más útiles pueden ser coordenadas polares .
Coordenadas rectangulares fijas
En este sistema de coordenadas, los vectores se expresan como una adición de vectores en el x, y, z y la dirección de un origen no giratorio. Por lo general, i es un vector unitario en la dirección x, j es un vector unitario en la dirección y, y k es un vector unitario en la dirección z.
El vector de posición, s (o R), el vector de velocidad, v, y la aceleración de vector, una se expresan en coordenadas rectangulares de la siguiente manera:



Nota:  ,
, 
Tres rotación dimensional marco de coordenadas
(A ser escrita)
Restricciones cinemáticas
Una restricción cinemática es ningún requisito relativo propiedades de un sistema dinámico que debe ser verdad en todo momento. A continuación se presentan algunos ejemplos comunes:
Rodando sin resbalar
Un objeto que rueda contra una superficie sin resbalar obedece a la condición de que la velocidad de su centro de masa es igual a la cruz producto de su velocidad angular con un vector desde el punto de contacto con el centro de masa,:

Para el caso de un objeto que no se incline o gire, esto se reduce a v = R ω.
Cable inextensible
Este es el caso donde los cuerpos están conectados por un poco de cuerda que permanece en tensión y no se puede cambiar la longitud. La restricción es que la suma de todos los componentes del cable, sin embargo, se define, es la longitud total, y la derivada de tiempo de esta suma es cero.