
NAO (robotique)
| Nao | |
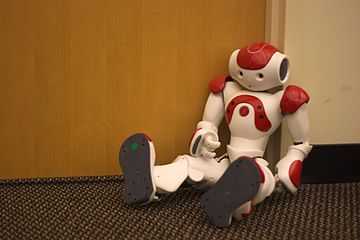
 Un robot NAO en 2014. |
|
| Système d'exploitation | Linux (intégré)Compatible avec Windows et Mac OS |
|---|---|
| Autonomie | 90 min[1] |
| Processeur | Intel Atom 1,6 GHz (V4) ou AMD Geode 550 MHz (V3.3) |
| Audio | 4 Microphones |
| Caméra | 2 caméras 920p, 30 ips |
| Connectivité | Ethernet, Wi-Fi (b, g, n ) |
| Dimensions | Hauteur : 58 cm |
| Masse | 4,8 kg |
| Degrés de liberté | 14 à 25 |
| modifier | |
NAO est un robot humanoïde français, autonome et programmable, développé par la société Aldebaran Robotics[2], une start-up française située à Paris.
Historique
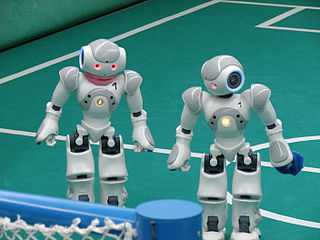
Le robot NAO a été présenté pour la première fois au public fin 2006. Il remplace à compter du 15 août 2007 le chien robot Aibo de Sony comme plateforme standard de la RoboCup, manifestation annuelle qui se présente comme la Coupe du Monde de Robotique[3].
Fin 2008, les versions Académics de NAO sont lancées pour permettre aux enseignants et aux chercheurs d'utiliser la plateforme robotique NAO dans les universités, établissements d'enseignement et les laboratoires de recherches.
Mi 2009, une première beta-test a permis à une trentaine de personnes de tester la version V3+.

Le 21 juin 2010, NAO est en démonstration à l'exposition universelle de Shanghai[4]. En octobre 2010, l'université de Tokyo annonce l'acquisition de trente robots NAO pour ses laboratoires de recherche[5].
Près de 4500 plateformes robotiques NAO avaient été vendus en fin 2013, principalement à des laboratoires de recherche[6].
En septembre 2013, il est le premier robot reçu au Palais de l'Élysée par le président de la république, François Hollande[7]. La même année, Blanca Li réalise un programme avec NAO, intitulé Robot !, pour le Festival Montpellier Danse et la deuxième édition de la « Fête de la Danse » au Grand Palais (Paris)[8].
Versions

Six prototypes de ce robot ont été développés :
- de janvier 2005 Ã mars 2006 : AL-01, AL-02 et AL-03
- de septembre 2005 Ã juillet 2006 : AL-04
- de juin 2006 Ã juin 2007 : AL-05.a
- de mai 2007 à décembre 2007 : AL-05.b
Fin mars 2008, une première version aboutie a été livrée aux participants de la RoboCup : la « NAO RoboCup Edition » (nommée aussi V2)[9].
Pour l'édition 2009 de la RoboCup, et aussi pour les universités, NAO V3 a été rendu disponible. Cette version corrige des problèmes de fiabilités révélés lors de la RoboCup, et dote NAO de nouvelles mains, désormais fonctionnelles (ces mains sont en fait des pinces à trois doigts). Mi-2009, l'édition Académic en version V3+ est disponible pour les laboratoires de recherche et les universités.
En mars 2010, la version 3.2 fait évoluer le robot NAO. On voit apparaître différents modèles de la plateforme robotique. NAO existe dorénavant en version Torse à 14 degrés de liberté, un humanoïde à 21 degrés de liberté et un autre à 25 degrés de liberté. En octobre 2010, la version V3.3 voit les bras de NAO s'allonger et sa tête mieux gérer le refroidissement.
En décembre 2011, la version NAO NEXT Gen est disponible. Le robot est plus puissant, avec de nouveaux moteurs, un processeur Intel Atom 1.6 GHz, deux caméras HD pour prendre des images/photos en haute définition et des capacités d'interactions améliorées : reconnaissance vocale et gestuelle[10].
Caractéristiques techniques
| Caractéristiques techniques | |
|---|---|
| Hauteur | 58 cm[2]. |
| Masse | 4,8 kg |
| Autonomie | 90 min[1] |
| Degrés de liberté | 14 à 25 |
| Processeur | Intel Atom 1,6 GHz (V4) ou AMD Geode 550 MHz (V3.3 ...) |
| Système d'exploitation intégré | Linux |
| Systèmes d'exploitation compatibles | Windows, Mac OS, Linux |
| Langages de programmation | C++, Python, Java, MATLAB, Urbi, C, .Net |
| Connectivité | Ethernet, Wi-Fi (b, g, n ) |
| Vision | 2 caméras 920p, 30 ips |
| Audio | 4 Microphones |
La plateforme robotique NAO existe en différents modèles qui comportent de 14 à 25 degrés de liberté. Elle est équipée d'une centrale inertielle avec un accéléromètre 3 axes et 2 gyromètres, de 2 sonars utilisant des capteurs à ultrason (émetteurs et récepteurs), de 8 capteurs de pressions résistifs sous les pieds et de 2 bumpers.
Le robot dispose également d'un système multimédia évolué incluant quatre microphones (pour la reconnaissance vocale et la localisation de la source sonore), deux haut-parleurs (pour la synthèse vocale), et deux caméras HD (1280 × 960 pixels) (pour la localisation ou la reconnaissance de visage ou d'objet). Ces deux caméras couleurs, positionnées verticalement, lui permettent de voir une personne de 1,8 m de la tête au pied à 1,5 m. Malheureusement, pour le moment, ces deux caméras ne sont pas activables en même temps. À l'origine, NAO ne disposait que d'une seule caméra et c'est suite aux besoins exprimés par la RoboCup qu'une seconde caméra (placée dans la bouche) a été ajoutée.
Il a aussi des capteurs d'interactions tels que des zones tactiles sur le dessus de la tête et sur les mains, deux LED infrarouges ainsi que deux bumpers (capteurs de contact) sur l'avant des pieds.
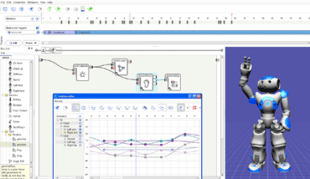
La plateforme robotique NAO est livrée avec une suite logicielle qui comporte un outil de programmation graphique (Choregraphe), un simulateur physique (NaoSim) et un kit de développement (SDK) qui permet de développer en Python (scripts des modules Chroregraphe) et C++ (modules embarqués). Des ponts en C#, Java et Matlab existent également. NAO est compatible avec Microsoft Robotics Studio, Cyberbotics Webots et Gostai Studio (Urbi).
NAO dispose de 90 minutes d'autonomie[1].
Design
Le design de NAO a été réalisé par Erik Arlen et Thomas Knoll, alors étudiants à Créapole dans le département Design Produit, dans le cadre d'une étude de cas entre cette école parisienne et Aldebaran Robotics[11].
Usage
Actuellement, la plateforme robotique NAO est principalement utilisée au sein de laboratoires de recherche et pour l'enseignement. Plus de 400 établissements l'utilisent tant pour explorer ses capacités d'interaction (comme avec des enfants autistes ou des personnes atteintes de la maladie d'Alzheimer...) que comme plateforme pédagogique[12].
La palette des usages potentiels de NAO est très vaste, à condition de les programmer : on peut l'imaginer comme robot de compagnie, partenaire de jeu, garde-malade, objet communicant, élève-robot, etc. Toutefois, sa faible autonomie (90 min) est une limitation importante.
Dans le domaine des médias, il est notamment utilisé depuis septembre 2014 dans l'émission de talk-show française Salut les Terriens !, diffusée sur Canal+ et présentée par Thierry Ardisson, et pose des questions aux invités, sous le pseudonyme de Jean-Mi[13],[14],[15],[16].
Merchandising
Produits pour les fans de NAO
Depuis le 24 novembre 2014, Aldebaran Robotics a créé un store (magasin en ligne) où sont commercialisés des produits à l’effigie de NAO, notamment des figurines NAO, des carnets et des t-shirts[17].
Galerie d'images
-
Démonstration de NAO en Espagne en 2011.
-
Un exemplaire de NAO Ã la Georgia Robotics and Intelligent Systems (GRITS) Lab, Georgia Tech.
{kind=link}
Notes et références
- 1 2 3 Les pionniers de la robotique humanoïde Aldebaran proposent un Developer Program, pour aider les développeurs à donner vie à Nao, developpez.net
- 1 2 « A la rencontre de Nao, le robot humanoïde français », sur itele.fr,‎ (consulté le 10 juillet 2014).
- ↑ « Nao, robot 100 % français, succède à Aïbo à la RoboCup », LesNumeriques.com, 30 août 2007.
- ↑ Répétition de la danse pour Shanghai, sur le site YouTube.
- ↑ « Le robot français Nao fait ses classes à l'Université de Tokyo », AFP sur Google News, le 13 octobre 2010.
- ↑ « NAO bientôt en vente pour le grand public ? », sur humanoides.fr,‎ (consulté en 20 ami 2015)
- ↑ « François Hollande et Arnaud Montebourg rencontrent un robot ... », Antoine Bayet, Europe1.fr - 12 septembre 2013.
- ↑ « NAO monte sur scène avec la chorégraphe Blanca Li », sur le site www.humanoides.fr - 18 septembre 2013.
- ↑ (en) « Standard Platform League », sur le site www.tzi.de - consulté le 18 mars 2015.
- ↑ Video NAO next gen, sur le site YouTube.
- ↑ « Nao, histoire humaine », sur le site www.techtic-co.eu - consulté le 18 mars 2015.
- ↑ Paris Descartes lance un programme d'éducation avec NAO, www.parisdescartes.fr
- ↑ « Portrait-robot de… Jean-Mi », Mustapha Kessous, Le Monde.fr, 24 octobre 2014 (consulté le 21 août 2015).
- ↑ « Thierry Ardisson : Jean-Mi, son nouveau chroniqueur, mesure 58 centimètres » Metronews.fr - 3 septembre 2014, consulté le 18 mars 2015.
- ↑ Séverine Fontaine, « Le robot NAO d’Aldebaran décroche un poste de chroniqueur sur Canal + », sur www.industrie-techno.com,‎
- ↑ Communiqué de presse : « Thierry Ardisson présente son nouveau chroniqueur: "Jean-Mi" venu d'une autre planète » de la société Aldebaran Robotics, sur le site www.aldebaran.com - consulté le 18 mars 2015.
- ↑ (en) Store d'Aldebaran Robotics, consulté le 18 mars 2015.
Annexes
Articles connexes
- Roméo (robot)
- ASIMO
- Aldebaran Robotics
Liens externes
- (en) Présentation du robot NAO par Aldebaran Robotics.
 Portail de la robotique
Portail de la robotique  Portail de l’informatique
Portail de l’informatique  Portail de la France
Portail de la France