
{kind=link}
Homothétie
|
|
Cet article ne cite pas suffisamment ses sources (juillet 2012). Si vous disposez d'ouvrages ou d'articles de référence ou si vous connaissez des sites web de qualité traitant du thème abordé ici, merci de compléter l'article en donnant les références utiles à sa vérifiabilité et en les liant à la section « Notes et références » (modifier l'article, comment ajouter mes sources ?).
|
En géométrie classique, une homothétie est une application ponctuelle caractérisée par un point invariant appelé centre et un réel appelé rapport. Par l'homothétie de centre O et de rapport k, le point M est transformé en un point M' tel que
 En d'autres termes, l'homothétie laisse O fixe et envoie le point M sur un point M' situé sur la droite (OM) par un agrandissement ou une réduction de rapport k . L'homothétie correspond donc à un changement d'échelle des figures.
En d'autres termes, l'homothétie laisse O fixe et envoie le point M sur un point M' situé sur la droite (OM) par un agrandissement ou une réduction de rapport k . L'homothétie correspond donc à un changement d'échelle des figures.
Le terme, dû au mathématicien français Michel Chasles, est composé des deux éléments d'origine grecque, le préfixe homo- pour « semblable » et thesis pour « position ». Il traduit la correspondance entre deux figures de même forme et de même orientation. Ainsi, deux poupées russes regardant dans la même direction peuvent être vues comme homothétiques.
On parle également d'homothétie dans un espace vectoriel ou un espace affine. L’homothétie vectorielle de rapport k est l'endomorphisme qui à tout vecteur v associe le vecteur kv, où le scalaire k est appelé rapport de l'homothétie. L’homothétie affine de centre O et de rapport k est l'application qui à tout point M associe le point M' défini par
Quand le corps des scalaires est commutatif, une homothétie vectorielle de rapport non nul est une application linéaire bijective, une homothétie affine de rapport non nul est une application affine bijective, et son application linéaire associée est l'homothétie vectorielle de même rapport. Les seules transformations affines dont l'application linéaire associée est une homothétie vectorielle de rapport différent de 0 et 1 sont des homothéties affines. L'ensemble des homothéties vectorielles de rapport non nul, muni de la composition, forme un groupe appelé groupe des homothéties, et l'ensemble des homothéties affines de rapport non nul et des translations muni de la composition forme également un groupe appelé groupe des homothéties-translations.
En dimension supérieure ou égale à 2, les homothéties affines de rapport non nul transforment une droite en une droite qui lui est parallèle, et ce sont, avec les translations, les seules applications de l'espace affine dans lui-même ayant cette propriété. Ceci permet une caractérisation purement géométrique des homothéties en dimension ≥ 2 : ce sont les applications affines qui transforment une droite en une droite parallèle et qui ont au moins un point fixe. Cette définition peut être utilisée dans le cadre d'une approche axiomatique de l'espace affine, elle utilise alors le théorème de Desargues affine, qui dans le cas de la dimension 2, doit être pris pour axiome (voir plan affine arguésien). En l'absence de celui-ci, on ne peut pas les définir.
En géométrie euclidienne, vectorielle ou affine, les homothéties de rapport non nul apparaissent comme des cas particulier de similitudes : elles multiplient les distances par la valeur absolue de leur rapport, et préservent les angles.
Définition en géométrie affine
Dans un espace affine P, pour un point donné O de P et un scalaire non nul k, l'homothétie de centre O et de rapport k est une transformation f du plan P qui laisse le point O invariant et telle que, pour tout point M distinct de O :
- Les points O, M et f(M) sont alignés ;
- Le rapport algébrique vaut k :
 .
.Deux cas particuliers (distincts en caractéristique différente de 2) doivent être mentionnés :
- Si
 , chaque point étant invariant, l'homothétie est la transformation identique.
, chaque point étant invariant, l'homothétie est la transformation identique. - Si
 , l'homothétie de rapport -1 est la symétrie centrale de centre O.
, l'homothétie de rapport -1 est la symétrie centrale de centre O.
Propriétés affines
- Toute homothétie transforme une droite en une droite qui lui est parallèle.
Sans utiliser le théorème de Thalès, si h est une homothétie de centre O envoyant les points  et
et  sur
sur  et
et  , alors la relation de Chasles donne :
, alors la relation de Chasles donne :
 .
.
En particulier, les droites  et
et  ont même droite vectorielle directrice ; elles sont donc parallèles.
ont même droite vectorielle directrice ; elles sont donc parallèles.
- Toute homothétie préserve le parallélisme : deux droites parallèles sont envoyées sur deux droites parallèles.
En effet, si deux droites  et
et  sont parallèles, et que h est une homothétie, alors par la propriété précédente,
sont parallèles, et que h est une homothétie, alors par la propriété précédente,  et sont parallèles, et
et sont parallèles, et  et sont aussi parallèles. Par transitivité, les droites et sont donc parallèles.
et sont aussi parallèles. Par transitivité, les droites et sont donc parallèles.
- Toute homothétie préserve les rapports algébriques.
Si M, N, P et Q sont quatre points alignés, et que h est une homothétie de rapport k, il a été obtenu :
 et
et  .
.
Si  , alors, comme k est non nul,
, alors, comme k est non nul,  . Donc, h préserve les rapports algébriques.
. Donc, h préserve les rapports algébriques.
Théorème de Thalès
Les propriétés citées ci-dessus sont une reformulation du théorème de Thalès :
- Théorème de Thalès : Soient un triangle
 et deux points N et A respectivement sur les droites
et deux points N et A respectivement sur les droites  et
et  . Alors les droites
. Alors les droites  et
et  sont parallèles ssi les rapports algébriques suivants sont égaux :
sont parallèles ssi les rapports algébriques suivants sont égaux :  .
.
En reprenant les notations du théorème cité, si les points A et N sont les images respectives des points B et M par la même homothétie de centre O, l'égalité des rapports algébriques est vérifiée. Le sens réciproque implique que les droites et sont parallèles. Le théorème de Thalès montre que toute homothétie transforme une droite en une droite qui lui est parallèle.
Par ailleurs, le théorème de Thalès montre qu'il existe exactement une unique homothétie de centre O envoyant M sur N. Cette homothétie envoie tout point B non aligné avec O, M et N sur le point d'intersection de la droite  avec la parallèle à passant par N. La construction de l'image d'un point de la droite
avec la parallèle à passant par N. La construction de l'image d'un point de la droite  nécessite de construire au préalable l'image d'un point non aligné avec O, M et N.
nécessite de construire au préalable l'image d'un point non aligné avec O, M et N.
Composition
La composée de deux homothéties de centre O et de rapports k et k' est une homothétie de centre O et de rapport kk'. L'ensemble des homothéties de centre O est donc stable par composition : il forme un sous-groupe commutatif du groupe des transformations de l'espace.
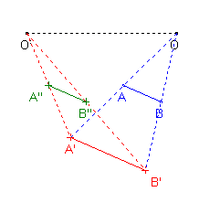
La composée de deux homothéties de centres différents O et O' et de rapports k et k' est :
- une translation de vecteur
 si le produit kk' =1 ;
si le produit kk' =1 ; - une homothétie de rapport kk' et de centre O" barycentre des points (O, kk'- k') et (O', k'-1) si kk' est différent de 1.
La composée t o h d'une homothétie de centre O et de rapport k et d'une translation de vecteur u est aussi une homothétie de rapport k et de centre O" barycentre des points (O, k) et (O', -1) où O' est le point tel que  . Enfin la composée h o t est une homothétie de rapport k et de centre O" barycentre de (O', k) et (O, -1) où O' est le point tel que
. Enfin la composée h o t est une homothétie de rapport k et de centre O" barycentre de (O', k) et (O, -1) où O' est le point tel que  .
.
Ces propriétés montrent que l'ensemble des homothéties et des translations est stable par composition ; il forme un sous-groupe non commutatif du groupe des transformations de l'espace.
Propriété en géométrie euclidienne
En géométrie euclidienne, la composée d'une rotation de centre O et d'une homothétie de centre O s'appelle une similitude de centre O. Comme toutes les similitudes, les homothéties vérifient les propriétés suivantes :
- Toute homothétie préserve les angles, et donc en particulier l'orthogonalité. Une homothétie est donc une transformation conforme.
- Une homothétie transforme un cercle en un cercle.
- Une homothétie de rapport k modifie les distances par un facteur
 et modifie les volumes par un facteur
et modifie les volumes par un facteur  où n est la dimension de l'espace.
où n est la dimension de l'espace.
Dans le plan complexe
Par l'homothétie de centre A d'affixe a et de rapport k, le point M d'affixe z a pour image le point M' d'affixe z' vérifiant :
 .
.
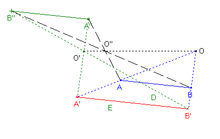
Figure caractéristique du trapèze
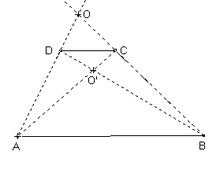
Si ABCD est un trapèze tel que  avec k différent de 1, il existe deux homothéties transformant [AB] en [CD]. Une de centre O' intersection des diagonales et de rapport –k et l'autre, de centre O intersection des droites (AD) et (BC) et de rapport k (cf. image à droite).
avec k différent de 1, il existe deux homothéties transformant [AB] en [CD]. Une de centre O' intersection des diagonales et de rapport –k et l'autre, de centre O intersection des droites (AD) et (BC) et de rapport k (cf. image à droite).
Géométrie vectorielle
Dans un espace vectoriel V sur un corps commutatif, on appelle homothétie de rapport le scalaire k l'application k.id, qui à tout vecteur v associe le vecteur kv. C'est un endomorphisme de V. Si V est de dimension finie n, la matrice de k.id, dans n'importe quelle base de V, est la matrice scalaire k.In où In est la matrice identité de taille n.
L'unique valeur propre de k.id est k. Un endomorphisme h de V est une homothétie si et seulement si tous les vecteurs non nuls de V sont propres pour h (ou encore : si h commute à tout endomorphisme de V ou même seulement à toute projection sur une droite).
On en déduit facilement — en posant V = E/ker(g) ≃ im(g) — que pour deux espaces vectoriels E et F et deux applications linéaires f et g de E dans F, si f(x) est un multiple de g(x) pour tout vecteur x de E, alors f est la composée de g par une homothétie de F.
Bibliographie
Jacqueline Lelong-Ferrand, Fondements de la géométrie, PUF, (ISBN 2-13-038851-5)
 Portail de la géométrie
Portail de la géométrie