{kind=link}
Asservissement (automatique)
|
|
Cet article ne cite pas suffisamment ses sources (juillet 2012). Si vous disposez d'ouvrages ou d'articles de référence ou si vous connaissez des sites web de qualité traitant du thème abordé ici, merci de compléter l'article en donnant les références utiles à sa vérifiabilité et en les liant à la section « Notes et références » (modifier l'article, comment ajouter mes sources ?).
|
En automatique, un asservissement est un algorithme dont l'objet principal est d'atteindre le plus rapidement possible et de limiter l'écart par rapport à sa valeur de consigne, quelles que soient les perturbations externes. Le principe général est de comparer la consigne et l'état du système de manière à le corriger efficacement. On parle également de système commandé par rétroaction négative ou en boucle fermée.
Principe
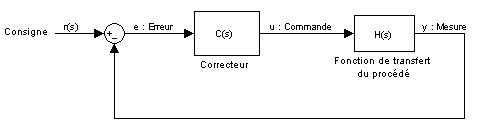
Le principe de base d'un asservissement est de mesurer l'écart entre la valeur réelle de la grandeur à asservir et la valeur de consigne que l'on désire atteindre, et de calculer la commande appropriée à appliquer à un (ou des) actionneur(s) de façon à réduire cet écart.
Ce principe pratiquement universel a cependant un inconvénient (généralement négligeable et négligé, sauf pour les systèmes très rapides ou nécessitant des suivis précis de trajectoire) : les actionneurs étant pilotés en fonction de l'écart entre valeur réelle et consigne, le système ne peut réagir que lorsque cet écart est effectif, c’est-à-dire avec un certain retard.
On peut, dans certains cas, compenser cet effet en complétant l'asservissement par un feed forward, c’est-à-dire en pilotant les actionneurs pour obtenir directement la valeur cible, ou du moins en donnant l'ordre qui permet de s'en approcher le plus en aveugle, si on sait prévoir le comportement des actionneurs. Par exemple on peut, dans le cas d'un asservissement en position, piloter directement l'accélération si on connaît l'accélération de la consigne.
Performances
Plusieurs paramètres caractérisent les performances d'un asservissement :
- la vitesse à laquelle la valeur finale sera atteinte. C'est le temps de réponse ;
- la stabilité. Pour une entrée constante, un système est stable si la sortie tend vers une valeur finie. Si elle oscille, l'asservissement est instable ;
- le dépassement ; souvent exprimé en % d'erreur. Même lorsqu'un système est stable, il arrive que la sortie dépasse la consigne avant de se stabiliser, ce qui n'est pas nécessairement une anomalie ;
- la précision, c’est-à-dire la capacité de l'asservissement à atteindre la consigne avec précision le plus rapidement possible.
Un asservissement agit sur plusieurs caractéristiques de la grandeur asservie telles que :
- la position : asservissement de position ;
- la vitesse : asservissement de vitesse ;
- l'accélération : asservissement d'accélération.
L'automaticien se heurte alors à un dilemme : la stabilité et la précision d'une part et l'amortissement et la rapidité d'autre part sont des critères antagonistes. Pour améliorer ces caractéristiques, il faut modifier les caractéristiques internes du système ou ajouter un correcteur dans la boucle d'asservissement. Il existe différents types de correcteurs, leur action peut être intégrale, dérivée et/ou proportionnelle.[réf. nécessaire]
Néanmoins, le compromis fondamental de l'automatique est l'antagonisme entre performance et robustesse. La robustesse d'un système bouclé est la capacité de celui-ci de rester stable (voire de conserver des performances suffisantes) en présence d'erreurs de modèle : erreurs sur les paramètres, dynamiques négligées.
Certains systèmes complexes optimisent plusieurs de ces caractéristiques pour obtenir des réponses à la fois rapides et précises. Pour des systèmes non mécaniques, on peut également asservir d'autres types de grandeur : tension, phase, etc. La contrainte principale étant de pouvoir les mesurer et d'agir sur elles par une commande efficace.
Notes et références
Articles connexes
- Amplificateur de mesure
- Automate programmable industriel
- Automatique
- Commande prédictive
- Régulation automatique
- Régulateur PID
 Portail de l’électricité et de l’électronique
Portail de l’électricité et de l’électronique